






Bürstenlose Gleichstrommotoren, kurz BLDC („Brushless DC-Motoren“), sind – entgegen ihrer Bezeichnung – Drehstrom-Synchronmaschinen: Der mit Permanentmagneten bestückte Läufer folgt einem magnetischen Drehfeld, die Bewegung ist synchron zur Wechselspannung, die an die Statorwicklungen angelegt wird. Der Begriff „bürstenloser Gleichstrommotor“ ist also weniger der richtigen Motorklassifikation geschuldet als vielmehr der Tatsache, dass er in vielen Applikationen bürstenbehaftete Gleichstrommotoren ersetzt. Bei einem bürstenbehafteten Gleichstrommotor wird eine Gleichspannung angelegt, die über einen mechanischen Wechselrichter im Motor – die Bürsten – einen drehzahlunabhängigen Wechselstrom erzeugt.
Zusammen mit einem elektronischen Antriebsregler, der die Funktion der Bürsten übernimmt und den eingespeisten Gleichstrom in Wechselstrom umwandelt, liefert der BLDC-Motor vergleichbare Leistungen wie ein bürstenbehafteter Gleichstrommotor – ohne die Bürsten, die eine begrenzte Lebensdauer haben. BLDC-Motoren werden daher auch als EC-Motoren (elektronisch kommutiert) bezeichnet, um sie von mechanisch kommutierten Motoren mit Bürsten zu unterscheiden.
Ein weiterer gebräuchlicher Begriff ist PMSM, Permanentmagnet-Synchronmotor. Hier wird der Begriff „Permanentmagnet“ als Unterscheidung zu anderen Synchronmotoren verwendet, die mit einer Feldwicklung auf dem Rotor arbeiten, während der BLDC-Motor permanent erregt ist. Mit anderen Worten: Der Rotor des Motors erzeugt mit Hilfe eines Permanentmagneten ein Magnetfeld, auch wenn der Stator nicht erregt ist.
Die Begriffe PMSM und BLDC werden häufig verwendet, um zwischen PMSM-Motoren mit sinusförmiger induzierter Spannung (Gegen-EMF) und BLDC-Motoren mit trapezförmiger induzierter Spannung (siehe unten) zu unterscheiden. Heute weisen die meisten BLDC-Motoren eine sinusförmige Gegen-EMK auf.
1. Aufbau/Typen
Die meisten BLDC-Motoren sind „Innenläufer“, bei denen sich der Rotor mit Permanentmagneten auf einer Welle in einem feststehenden Stator mit Spulen dreht. Bei „Außenläufern“ sitzt der Stator innen, und der Rotor besteht aus einer außen laufenden Glocke, in der Magnete angebracht sind.
Die Vorteile von Innenläufermotoren liegen in ihrer geringeren Rotorträgheit und der besseren Abfuhr der Verlustwärme, wohingegen beim Außenläufer die Wärme erzeugenden Spulen durch die Rotorglocke und Magnete gegenüber ihrer Umgebung isoliert sind. Aufgrund ihres hohen Rotorträgheitsmoments und der Tatsache, dass sich die Rotorglocke nur schwer wuchten lässt, sind Außenläufer für sehr hohe Drehzahlen ungeeignet.
In der Mehrzahl der industriellen Anwendungen werden daher Innenläufer eingesetzt. Außenläufermotor spielen ihre Vorteile in Massenanwendungen aus, da sie günstiger zu produzieren sind. Sie können außerdem kürzer gebaut werden und besitzen normalerweise ein geringeres Rastmoment sowie durch den größeren Rotordurchmesser bei gleicher magnetischer Kraft ein höheres Drehmoment.
Beide Motorausführungen werden in der Regel mit drei Phasen produziert. Es gibt aber auch Ausführungen mit einer oder zwei Phasen. Im Folgenden werden nur die dreiphasigen BLDC-Motoren betrachtet, da Nanotec nur diese produziert.
Sowohl Innen- als auch Außenläufer werden mit genuteter Wicklung („slotted“) produziert, hier ist der Wicklungsdraht um die Stator-Polschuhe („Eisenkern“) gewickelt, die die magnetischen Feldlinien der Wicklung in einer definierten Form heraustreten lassen und konzentrieren. Der Stator besteht aus dünnen, gegeneinander isolierten Blechen, um die Wirbelstromverluste gering zu halten.
Eine besonders bei sehr kleinen Motoren wichtige Sonderform der Innenläufer sind die nutenlosen („slotless“) BLDC-Motoren, deren Stator nur aus ringförmigen Blechen besteht, auf die innen eine flache, verklebte bzw. vergossene Wicklung aufgebracht wird. Da es keinen Eisenkern gibt, ist die Induktivität des Motors sehr niedrig und der Stromanstieg in den Wicklungen sehr schnell. Darüber hinaus sind die Eisenverluste stark reduziert, die Motoren haben einen höheren Wirkungsgrad. Im Langsambetrieb wirkt sich das fehlende Drehmomenttripple positiv aus. Da das Magnetfeld nicht wie bei Standard-BLDC-Motoren an den Polschuhen verstärkt wird, tritt kein Rastmoment auf. Besonders bei Motoren mit einem Durchmesser unter 40 mm ist diese Bauform wichtig, da ihre Leistungsdichte erheblich höher ist als die von genuteten Motoren. Das kommt daher, dass bei genuteten Motoren produktionsbedingt zwischen den Wicklungen immer ein relativ großer Anteil des Stators leer bleibt, während dieser Bauraum bei nutenlosen Motoren komplett mit der Kupferwicklung gefüllt werden kann. Je kleiner der Durchmesser des Motors wird, desto stärker tritt dieser Vorteil der nutenlosen Motoren in Erscheinung.



2. Ansteuerung/Kommutierung
Der BLDC-Motor dreht sich, weil der Permanentmagnet auf dem Rotor versucht, sich in Richtung des durch die Elektromagnete des Stators erzeugten Magnetfelds auszurichten. Dabei ist das Drehmoment maximal, wenn beide Magnetfelder senkrecht aufeinander stehen. Die Art der Ansteuerung unterscheidet sich in zweierlei Hinsicht, einmal in der Form der Bestromung der Wicklungen (block- oder sinusförmig), zum anderen in der Methode der Rotorlagenbestimmung. Die Rotorlagenbestimmung ist notwendig, da die Ströme in den Wicklungen zeitlich so umgeschaltet werden müssen, dass das Statormagnetfeld immer senkrecht zum Rotormagnetfeld steht, sich also mit der gewünschten Geschwindigkeit weiterdreht.
2.1 Blockkommutierung
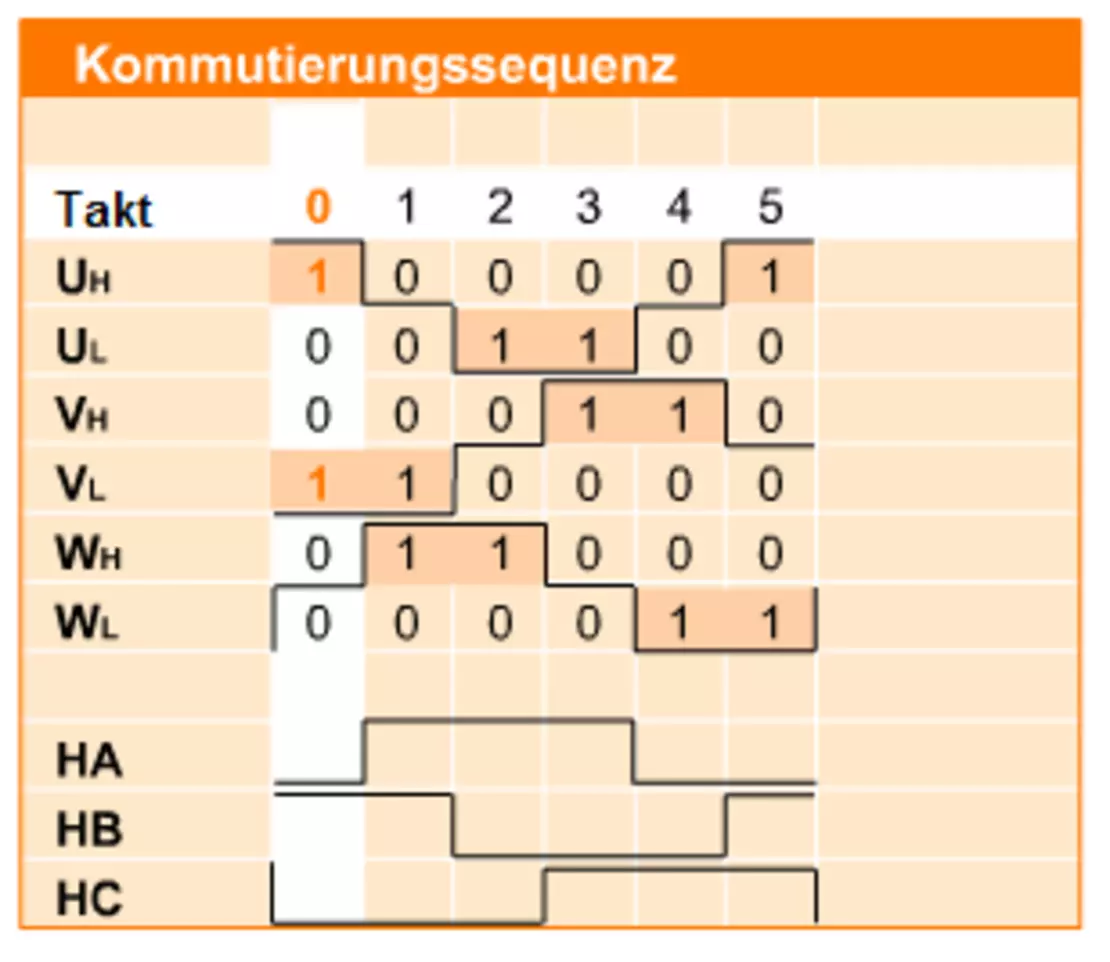
Am einfachsten lässt sich die Rotorlage durch Hallsensoren im Motor bestimmen, die von einem passend ausgerichteten Magneten auf dem Rotor genau dann geschaltet werden, wenn die Wicklung umgeschaltet werden muss. Den drei Wicklungen entsprechen dann drei Hallsensoren, deren Zustand definiert, wie die Wicklungen beschaltet sein müssen. Wenn man die drei Wicklungen digital umschaltet, also entweder keinen oder den vollen Strom auf die Wicklungen gibt, spricht man von Blockkommutierung. Diese Kombination aus Hallsensoren und Blockkommutierung ist die technisch am einfachsten umzusetzende Methode, um einen BLDC-Motor anzusteuern. Nachteilig bei diesem Verfahren ist, dass das Statormagnetfeld aufgrund der diskreten Umschaltung nicht immer senkrecht zum Rotormagnetfeld steht, da die Ausrichtung des Statormagnetfelds über 60° gleich bleibt, während sich der Rotor bis zum nächsten Umschaltpunkt weiterdreht. Die Hallsensoren sind so positioniert, dass das Statormagnetfeld in der Mitte zwischen zwei Umschaltpunkten senkrecht steht, es ergibt sich also an den Umschaltpunkten ein Fehlwinkel von jeweils 30°, durch den das Drehmoment dort 13,4% (1-Cosinus(30°)) niedriger ist. Es ergibt sich somit bei der Blockkommutierung ein Drehmomentrippel in dieser Höhe mit der sechsfachen Frequenz der elektrischen Drehfrequenz des Motors. Dies führt zu Vibrationen und Geräuschen, vor allem bei geringeren Drehzahlen dreht der Motor nicht gleichmäßig. Die Blockkommutierung ist deshalb für Anwendungen, in denen die Motoren zumindest auch zeitweise langsam drehen müssen (unter ca. 10% der Nenndrehzahl) nicht geeignet. Der Drehmomentrippel bewirkt im Durchschnitt einen Verlust von ca. 4,5% des Drehmoments und entsprechend auch einen Verlust an Wirkungsgrad gegenüber einer thermisch äquivalenten optimalen Bestromung der Wicklungen.
2.2 Sinuskommutierung
Die optimale Form der Bestromung ist die Sinuskommutierung, bei der jede Wicklung des Motors mit einer um 120° versetzten Sinuskurve bestromt wird, so dass sich ein kontinuierlich drehendes Statormagnetfeld konstanter Stärke ergibt. Prinzipiell kann die Sinuskommutierung auch eingesetzt werden, wenn nur Hallsensoren zur Bestimmung der Rotorlage zur Verfügung stehen, indem zwischen den Umschaltpunkten interpoliert wird. Dies führt in den meisten Fällen schon zu einer deutlichen Verbesserung des Laufverhaltens des Motors. Bei Lastveränderungen zwischen zwei Hallsensoren wird die Sinuskurve jedoch nicht angepasst, und es kommt zu einer Fehlstellung des Magnetfelds, die erst mit dem nächsten Hallsensorsignal korrigiert wird.
Die Sinuskommutierung erfordert daher idealerweise ein höher auflösendes System zur Bestimmung der Rotorlage, normalerweise einen optischen oder magnetischen Encoder, der die Position des Rotors zu jedem Zeitpunkt hinreichend genau bestimmt und die Ströme entsprechend anpasst.
2.3 Feldorientierte Regelung
Manchmal wird die feldorientierte Regelung noch von der Sinuskommutierung unterschieden, oft werden beide Begriffe aber auch austauschbar gebraucht. Austauschbar werden die Begriffe gebraucht, weil die Sinuskommutierung, so wie sie eben beschrieben wurde, das Statormagnetfeld optimal regelt.
Solange man in der Beschreibung der Sinuskommutierung ausblendet, wie der Stromregler selbst funktioniert, wird der Unterschied nicht sichtbar. Im Vorhergehenden wurde davon ausgegangen, dass eine sinusförmige Stromvorgabe gemacht wird, die dann – ausreichend schnell – durch den Stromregler in die Wicklung eingeprägt wird. Beide Aufgaben, die Stromvorgabe (die dem Drehmomentregelkreis entspricht) und die Stromregelung der Wicklungen, werden also bei der Sinuskommutierung getrennt betrachtet bzw. von getrennten Reglern durchgeführt. In diesem Fall erhalten jedoch die Stromregler für die Wicklungen mit steigender Geschwindigkeit eine Stromvorgabe, die sich mit hoher Frequenz ändert, während gleichzeitig der stärker werdende Einfluss der Gegen-EMK des Motors kompensiert werden muss. Da die Bandbreite der Stromregler nach oben begrenzt ist, kommt es bei höheren Geschwindigkeiten zu Phasenverschiebungen und Verzerrungen der Ströme, so dass das Statormagnetfeld nicht mehr rechtwinklig zum Rotor steht.
Die feldorientierte Regelung löst dieses Problem, indem der Stromvektor direkt im drehenden Koordinatensystem des Rotors geregelt wird. Dazu werden die gemessenen Ströme der drei Phasen durch eine Clark-Park-Transformation in das zweiachsige Koordinatensystem des Rotors transformiert. Die Drehmomentvorgabe wird also nicht mehr wie bei der Sinuskommutierung zuerst in Stromvorgaben für die einzelnen Wicklungen umgerechnet, die dann jeweils separat geregelt werden, sondern es werden gleichzeitig im Koordinatensystem des Rotors Stromhöhe und Orientierung des Magnetfelds geregelt und daraus anschließend (durch eine inverse Clark-Park-Transformation) die Ströme für die einzelnen Wicklungen berechnet. Die Regelung ist damit frequenzunabhängig und ergibt auch bei hohen Drehzahlen immer noch optimal sinusförmige Ströme.
2.4 Sensorlose Regelung
Die sensorlose Regelung ist kein weiteres Regelungsverfahren, sondern eine Bezeichnung für Methoden zur Rotorlagenbestimmung, die ohne Sensoren (Hallsensoren, Encoder) auskommen. Diese Methoden zerfallen grob in zwei Klassen:
Einfache sensorlose Ansteuerungen basieren auf der direkten Messung der Gegen-EMK in der jeweils nicht bestromten Wicklung. Diese Methode erfordert im Vergleich zu einer Standardansteuerung eine spezielle Hardware und funktioniert unter ca. 20% der Nenndrehzahl des Motors nicht mehr stabil, da das Mess-Signal zu klein ist. Zudem funktioniert dieses Verfahren nur in Verbindung mit Blockkommutierung, da bei der Sinuskommutierung immer alle drei Spulen gleichzeitig bestromt sind.
Anspruchsvollere Lösungen basieren auf einer sogenannten „Beobachterregelung“, die nicht direkt messbare Größen, wie Geschwindigkeit oder Gegen-EMK, aus anderen vom Stromregler gemessenen Größen rekonstruiert. Der Kern eines solchen Systems ist ein möglichst exaktes Modell des Motors, das parallel zum realen Motor aus den bekannten Eingangsgrößen, wie der gestellten PWM, parallel die Werte berechnet, die auch gemessen werden, wie die Stromhöhe in der Wicklung. Die berechneten Werte werden mit den real gemessenen Werten in jedem Zyklus verglichen. Durch den so ermittelten Beobachterfehler werden die internen Größen des Motormodells permanent nachgeregelt, auf diese Weise erhält man auch für die eigentlich nicht gemessenen Größen – wie die Geschwindigkeit – eine korrekte Schätzung. Obwohl diese Methode nur funktioniert, weil sich die Reaktion der Wicklung durch die induzierte Spannung geschwindigkeitsabhängig ändert, sind die direkt gemessenen Größen auch bei kleineren Geschwindigkeiten noch gut messbar. So erhält man einen „virtuellen Drehgeber“, der ab einer gewissen Minimalgeschwindigkeit die Positions- und Drehzahlinformation mit der gleichen Präzision wie ein realer optischer oder magnetischer Drehgeber liefert. Da bei diesem Verfahren die Gegen-EMK nicht direkt gemessen werden muss, kann sie auch mit Sinuskommutierung bzw. der feldorientierten Regelung kombiniert werden.
Beiden sensorlosen Methoden ist gemeinsam, dass im Stillstand keine Information zur Rotorlage verfügbar ist, es wird also eine spezielle Anlaufmethode benötigt. Ähnlich wie bei einem Schrittmotor wird der Motor dazu im gesteuerten Betrieb einige Kommutierungszyklen betrieben, bis er die notwendige Geschwindigkeit erreicht und die sensorlose Messung eine Rotorposition ermitteln kann.
3. Wichtige Kenngrößen
| Leerlaufdrehzahl (no load speed) | max. Drehzahl des unbelasteten Motors, bestimmt hauptsächlich durch die Spannungskonstante |
|---|---|
| Leerlaufstrom (no load current) | Strom bei Leerlaufdrehzahl (Verbrauch zur Überwindung der Reibung) |
| Nenndrehzahl/Nennmoment | Nennarbeitspunkt |
| Spitzenmoment | kurzzeitig erreichbares Moment, normalerweise 3x Nennmoment für ca. 5s, dann Hitzetod => I2T |
| Drehmomentkonstante (Nm/A) | gibt den Zusammenhang zwischen Drehmoment und Strom an |
| Spannungskonstante (V/krpm) | induzierte Gegen-EMK pro Drehzahl |