
Die Nanotec Electronic GmbH & Co. KG fördert seit vielen Jahren wissenschaftliche Projekte in Universitäten, Hochschulen und Berufsakademien mit Produkten und Expertenwissen. Die Unterstützung eines wissenschaftlichen Projektes erfolgt unter der Maßgabe, dass es thematisch und inhaltlich innovativ ist, den Methoden wissenschaftlichen Arbeitens und Forschens entspricht und positive Auswirkungen auf die Gesellschaft erwarten lässt.
Förderpartner Deutschlandstipendium
Das Deutschlandstipendium fördert seit dem Sommersemester 2011 mit 300 Euro monatlich Studierende sowie Studienanfängerinnen und Studienanfänger, deren Werdegang herausragende Leistungen in Studium und Beruf erwarten lässt. Die Hälfte der Summe trägt der Bund und die andere Hälfte übernehmen private Stifter. Vom neuen Bündnis aus zivilgesellschaftlichem Engagement und staatlicher Förderung sollen mittelfristig bis zu acht Prozent der Studierenden an jeder deutschen Hochschule profitieren, wobei die Zahl der Geförderten kontinuierlich anwachsen soll.
Aus unserer Sicht bildet unser wissenschaftlicher Nachwuchs die Basis für die wirtschaftliche Zukunft unseres Landes. Dies gilt es zu unterstützen. Deshalb zählt Nanotec Electronic zu den Förderern des Deutschlandstipendium.
Foto: Astrid Eckert, TU München

Geförderte Projekte

Smarte Bodenanalyse mit ANELISE
Die Analyse von Bodenproben intelligent automatisieren – das ist das Ziel des Projekts ELISE der OTH Regensburg. Einen besonderen Augenmerk legen die Studen:innen dabei auf die Optimierung der Probenentnahme. Denn bisherige, meist „brachiale“ Methoden verunreinigen die Proben oft. Ein Problem, das zu falschen Messergebnissen führt.
Mit Hilfe eines autonom fahrenden Roboters soll das Material nun schonender gewonnen werden. ANELISE extrahiert die Proben an vordefinierten Stellen, aus jeweils aus gleicher Tiefe und ohne Beimischung von toten Mikroorganismen bzw. Fremdmaterial.
Die Realisierung des Projekts unterstützt Nanotec mit dem BLDC-Motor DB59, samt Präzisionsplanetengetriebe GPLE40 und Controller CL4. Der Antrieb sorgt für eine präzise Probenentnahme bei minimalem Kraftaufwand und bietet dem:der Anwender:in die Kontrolle über alle Daten in Echtzeit.
(Quelle und Fotos: Michael Fellner)

Upgrade für den Tennisplatz
Einen Roboter, der das Schleppnetz über den Tennisplatz zieht, haben Studierende der HTL Rennweg entwickelt. Auf Knopfdruck bewegt sich der sogenannte „Court Bot“ autonom über die Fläche, verteilt den Sand regelmäßig und glättet Unebenheiten.
Um den gesamten Bereich abziehen zu können, ist der Roboter mit Nullwendekreis-Rädern (Zeroturn) ausgestattet. Zusätzlich kann er das Schleppnetz anheben und um 90 Grad drehen. Dadurch minimiert er seine Arbeitsbreite, kann Hindernisse umfahren und bis in jede Ecke manövrieren.
Für die Realisierung des Projekts stellt Nanotec den Studierenden mehrere Komponenten zur Verfügung, darunter SCA5618-Schrittmotoren, PD6-BLDC-Motoren mit integriertem Controller, und GPLE60-Präzisionsplanetengetriebe.
(Quelle und Fotos: Alexander Heim)
Hightech trifft Fußball
Unter dem Namen „Delft Mercurians“ gehen die Student:innen der Robotics Student Association Delft (NL) beim RoboCup an den Start. In der Small-Sized League stellen sie sich hier dem internationalen Wettbewerb.
Bei einem Miniatur-Roboter-Fußballspiel treten zwei Teams mit je sechs autonom fahrenden Einheiten gegeneinander an. Diese müssen nicht nur punktgenau und mit hoher Geschwindigkeit agieren, sondern auch physikalische Beschränkungen und Regeln einhalten, die dem „echten“ Fußball ähneln.
Für diese Herausforderungen stellt Nanotec den Studierenden der TU Delft u.a. mehrere flachet DF45-Außenläufermotoren und hochauflösende NME2-Encoder zur Verfügung, die für das Plus an Drehmoment und Geschwindigkeit sowie die nötige Kodierung bei Lokalisierung und Positionskontrolle sorgen.
(Quelle und Fotos: Zhengyang Lu)

KI-gesteuerter Kickertisch
Dieses Projekt der TU Darmstadt lässt die Grenzen zwischen Mensch und Maschine verschwimmen. Der KI-gesteuerte Kickertisch wurde im Rahmen eines Forschungsprojekts gebaut, das sich der Entwicklung von robusten Algorithmen für KI-basierte Robotersteuerungen widmet. Die Spielfiguren werden von den High-Performance-Controllern C5-E und den bürstenlosen DC-Motoren DB59 von Nanotec gelenkt, so dass Matches gegen künstliche Intelligenz möglich werden.
(Quelle und Fotos: Janosch Moos)

Sechs-Achsen-Knickarm-Roboter
Einen Sechs-Achsen-Roboter entwickelte ein Studierender der TU München im Rahmen des Master-Studiums „Mechatronik Robotik“. Das Knickarm-System eignet sich besonders für dynamische Positionieraufgaben.
Ausgestattet ist der riemengetriebene Leichtbau-Roboter mit zwei DFA68- sowie vier DF45-Außenläufermotoren, die per CL4-E-Controller gesteuert und über die CANopen-Schnittstelle angesprochen werden.
Die Komponenten stellt Nanotec im Rahmen der Projektförderung zur Verfügung.
(Quelle und Fotos: Adrian Prinz)
PVD-Anlage mit optimiertem Tischantrieb
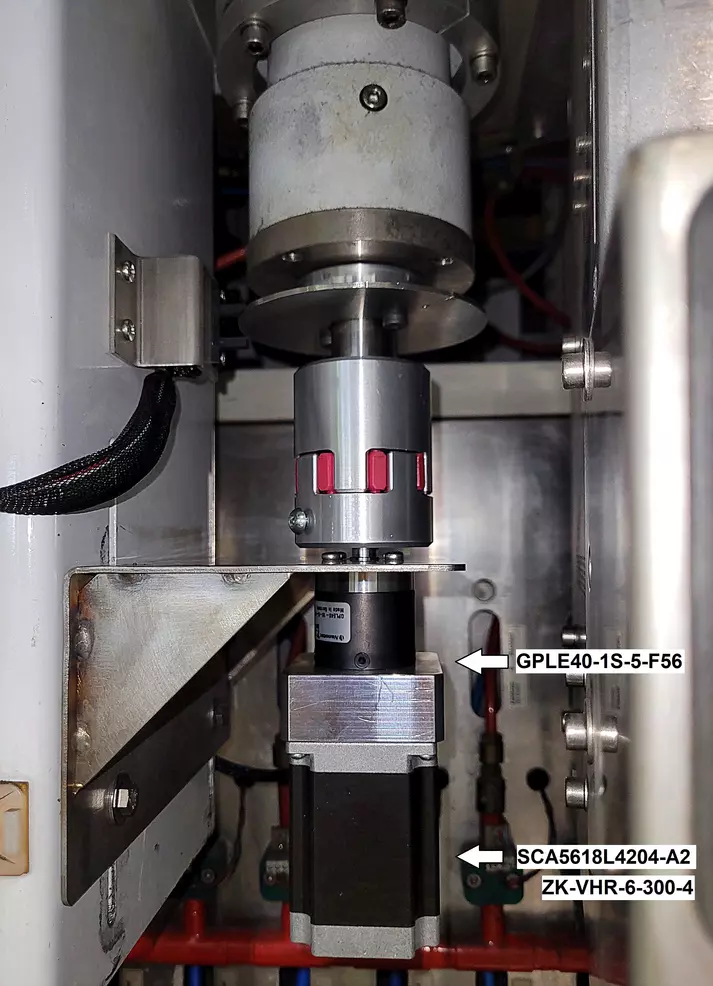
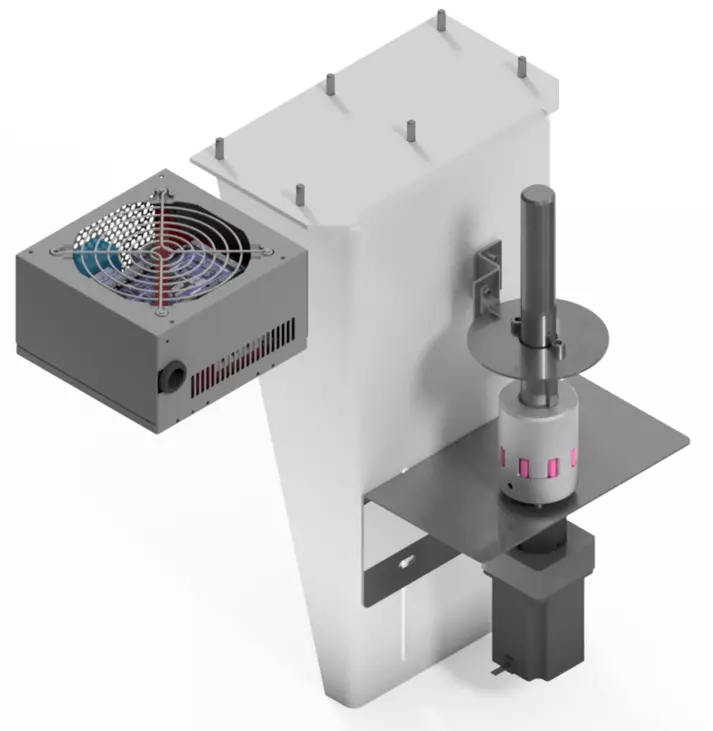
Im Rahmen eines Masterprojektes konzipierten Studierende der Hochschule Niederrhein den Tischantrieb einer PVD-Anlage (PVD = Physical Vapour Deposition) neu. Die Herausforderung: Der Drehtisch der PVD-Beschichtungsanlage sollte neben einer Feinjustierung der Rotationsgeschwindigkeit auch Entnahmen an einer definierten Position ermöglichen.
Die passende Software und Steuerung entwickelten die angehenden Mechatroniker:innen selbst. Die mechanischen Komponenten stellte Nanotec bereit. Mit Unterstützung des Schrittmotors SCA5618 und des Planetengetriebes GPLE40 wurde die Anlage erfolgreich in Betrieb genommen.
(Quelle und Fotos: Nikolai Desch)


KA-RaceIng auf Erfolgskurs
Unter dem Namen „KA-RaceIng“ ist das Karlsruher Institut für Technologie in der Formula Student ganz vorne mit dabei. Mit dem neu entwickelten, autonom fahrenden Einsitzer KIT23 wollen die StudentInnen ihre Erfolgsserie fortsetzen.
Eine zentrale Rolle spielen dabei der bürstenlose DC-Flachmotor DFA90 und der High-Performance-Controller C5-E-2. Die von Nanotec gesponserten Produkte sorgen – in Kombination mit einem von KA-RaceIng entwickelten Getriebe – für eine präzise und schnelle Lenkung, die den Anforderungen der Formula Student gerecht wird. Und die Erwartungen des Teams sind hoch: Mit dem KIT23 wollen es die StudentInnen nicht nur in dieser, sondern auch in den kommenden Saisons auf die Siegertreppe schaffen!
(Quelle und Fotos: Simon Enderle)

Einfacher Akku-Transport mit Os.cart
Bis zu 100 kg wiegt der Rennwagen-Akku, der vom Os.car Racing Team der FH Campus Wien regelmäßig aus dem Fahrzeug gehoben und zur Ladestation gebracht werden muss. Erledigt wird diese Aufgabe ab sofort mit dem offiziellen Transportwagen „Os.cart“ – entwickelt im Rahmen einer Diplomarbeit der HTL Rennweg.
Und so funktioniert´s: Mit Hilfe des spindelbetriebenen und stufenlos höhenverstellbaren Scherenmechanismus fährt Os.cart bis auf Cockpithöhe des Rennwagens. Der Akku lässt sich so komfortabel ein- und ausbauen, ergonomisch und mit minimalem Kraftaufwand.
Realisiert wurde Os.cart u.a. mit Hilfe verschiedener Komponenten von Nanotec, darunter der Schrittmotor ST6018, WEDL-Encoder sowie die Planetengetriebe GP56 und Controller C5-E.
(Quelle und Fotos: Kerstin Preisl)
Octa-Mix – optimale Mischung
Für die ideale Getränkemischung sorgt der neu entwickelte „Octa-Mix“. Das von Studierenden der HTL Rennweg konstruierte Gerät kombiniert unterschiedliche Flüssigkeiten nach Vorgabe und stellt im Handumdrehen den gewünschten Mix bereit.
Das Mischverhältnis wird per Touch-Display bzw. Android-App definiert. Ob Wasser, Sirup oder Konzentrat – der Octa-Mix ist mit acht Getränketanks ausgestattet und macht auch komplexe Rezepturen möglich. Die präzise Dosierung übernimmt u.a. ein System aus Peristaltikpumpen. Diese werden mit neun Schrittmotoren ST4118 gesteuert, die Nanotec im Rahmen der Projektförderung für Unis bereitstellt.
(Quelle und Fotos: Fabian Gutruf)


Raceyard goes Driverless
Mit Team „Raceyard“ sind die Studierenden der Fachhochschule Kiel fester Bestandteil der Formula Student Germany (FSG) – dem internationalen Konstruktionswettbewerb für Rennwagen. Das Ziel war die Weiterentwicklung des Einsitzers T-Kiel A 22 E zum fahrerlosen Fahrzeug.
Größte Herausforderung war hierbei die Umrüstung der manuellen Lenkung auf den autonomen Fahrbetrieb. Mit dem High-Performance BLDC-Motor DB43 samt Planetengetriebe GPLE40, Encoder NTO3 und Controller C5-E stellte Nanotec die passenden Komponenten bereit.
(Quelle und Fotos: Bo Kluth )

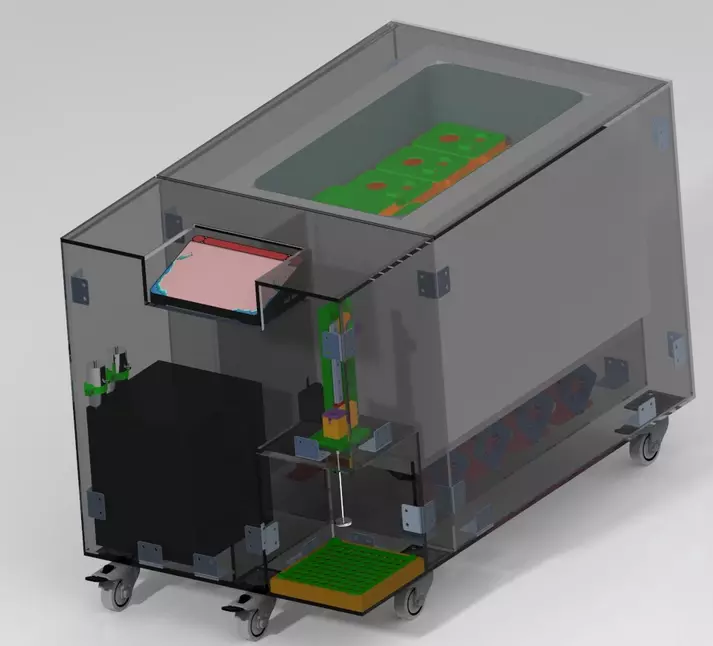
RoundT – die durchsichtige Getränkeabfüllanlage
Der RoundT wurde von vier Studierenden der HTL Rennweg entwickelt. Wie der Name RoundT schon verrät, handelt es sich dabei um einen runden Tisch.
In seinem Inneren befindet sich eine Kühlkammer mit sechs Getränkebehältern, die je vier Liter Fassungsvermögen haben. Die Kammer schafft es, die Getränke innerhalb von 20 Minuten auf 14 °C herunterzukühlen.
Der innere Teil fährt per App-Befehl eine Motor-Zahnrad-Spindel-Verbindung hoch und runter. Dafür stellte Nanotec den Schrittmotor ST5918L2008-B zur Verfügung. Er treibt ein Zahnrad an, das die Spindel sowie den verbundenen inneren Teil mit in Bewegung setzt. Um ein Getränk zu zapfen, steckt man einfach einen Becher auf eins der acht Zapfventile (Eigenfertigung) und wählt per App sein Wunschgetränk aus. Durch die transparente Tischplatte kann man dann live beobachten, wie das gekühlte Getränk durch das Schlauchsystem von unten in den Becher gefüllt wird.
(Quelle und Fotos: Dominik Michalski / Niklas Eichelberger)

Solar Boot
Das Solar-Boot ist das Universitätsprojekt einer Gruppe von Studenten der Ingenieurswissenschaften am Instituto Superior Técnico in Lissabon, Portugal.
Diese Saison baut das Team das zweite Boot, die SR02. Die SR02 wird eine Länge von 6 m und eine Breite von 2 m haben. Das Boot wird leichter, schneller und effizienter sein. Um seine Ziele zu erreichen, arbeitet das Team an einem Tragflügelsystem. Das System hebt das Boot aus dem Wasser, indem es den Strömungswiderstand reduziert. Dafür bauen die Studierenden eine elektronische Steuerung für den Anströmwinkel der Unterwasser-Flügel. Aktuatoren aus dem Hause Nanotec kontrollieren zusammen mit Sensoren die Unterwasser-Flügel.
Die Projektgruppe setzt drei Schrittmotoren ein, die alle von N5-1-2-Controllern angesteuert werden und mit NOE2-Encodern ausgestattet sind, um die exakte Position der Tragflügel zu bestimmen. Dank der detaillierten Datenblätter und der Software „Plug and Drive Studio“ können die Studierenden verschiedene Durchführungs-Modi austesten und leicht alle gewünschten Parameter setzen.
(Quelle und Fotos: Sebastião Beirão)
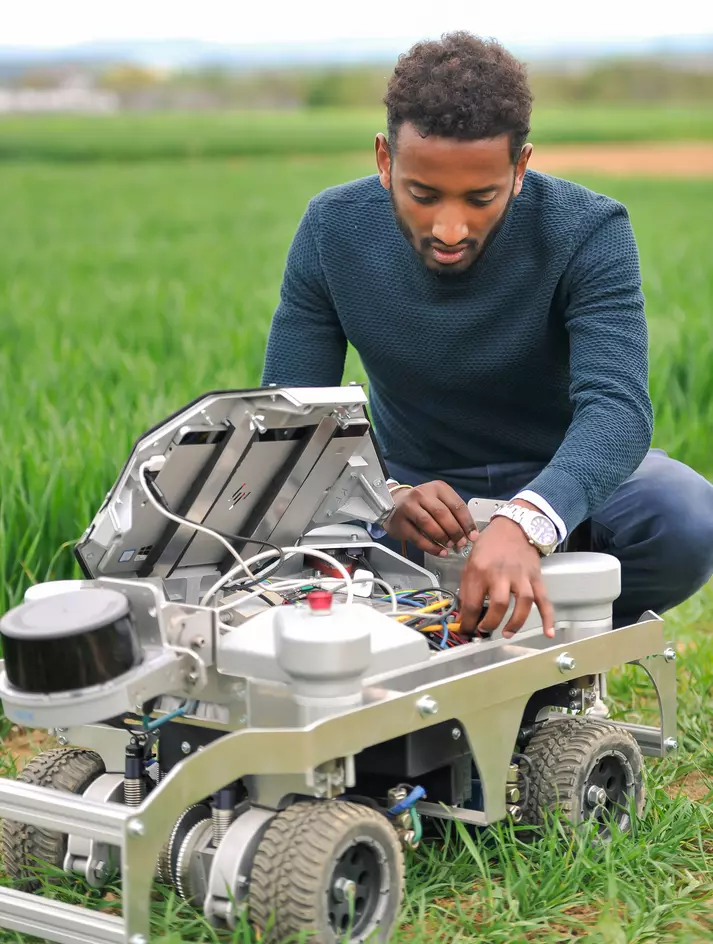
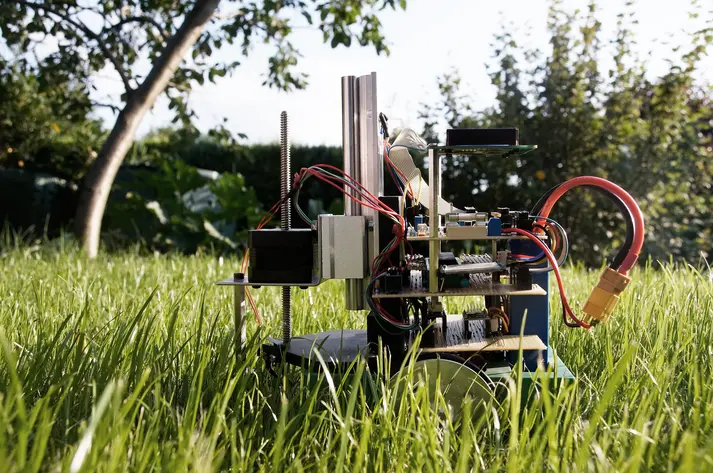
Autonomer Feldroboter
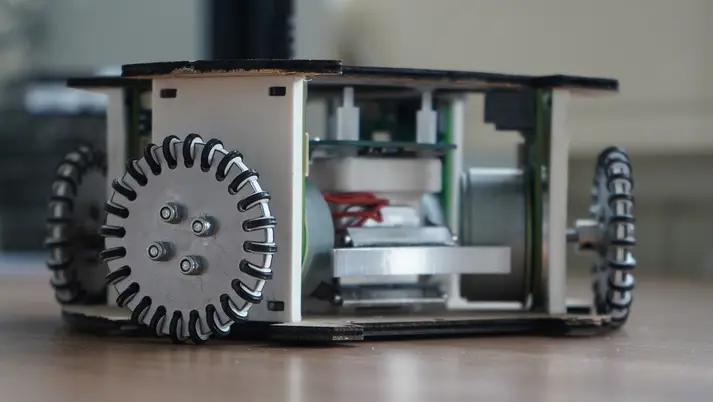
An der Universität Hohenheim wird aktiv daran geforscht, in Zukunft autonome Feldroboter in der Landwirtschaft einzusetzen. Dazu nimmt ein Team von Studierenden regelmäßig am „Field Robot Event“ teil. Dieser jährlich stattfindende Roboterwettbewerb hat zum Ziel, unterschiedliche Aufgaben in der Landwirtschaft, die bisher als zu zeitaufwändig und unrentabel galten, mit kleinen Robotern autonom zu verrichten.
Dank der Unterstützung von Nanotec konnte ein neuer Roboter namens „Goliath“ programmiert und gebaut werden. Die Maschine ist so konstruiert, dass sie zwischen den Pflanzenreihen navigieren und für autonome Monitoring- oder kleine Manipulationsaufgaben im Feld eingesetzt werden kann. Dazu wird jedes Jahr eine weitere Aktorik entworfen und mit in den Roboter integriert.
Goliath besitzt eine Einzelradlenkung und einen Einzelradantrieb, in denen die Motoren PD4-C5918M4204 und PD6-N8918S6404 in Betrieb sind. Die Ansteuerung erfolgt über das CANopen-Protokoll, das mithilfe eines integrierten Tablets und ROS (Robot Operating System) Middleware gesteuert wird. Die Umgebungserkennung erfolgt mit Laserscannern und Kameras.
(Quelle und Fotos: Jonas Esterl / Dr. sc. agr. Dipl.-Ing. David Reiser)
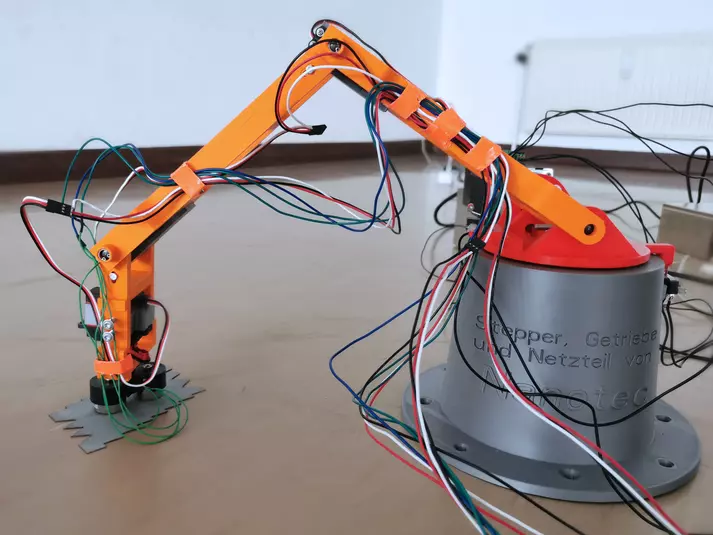
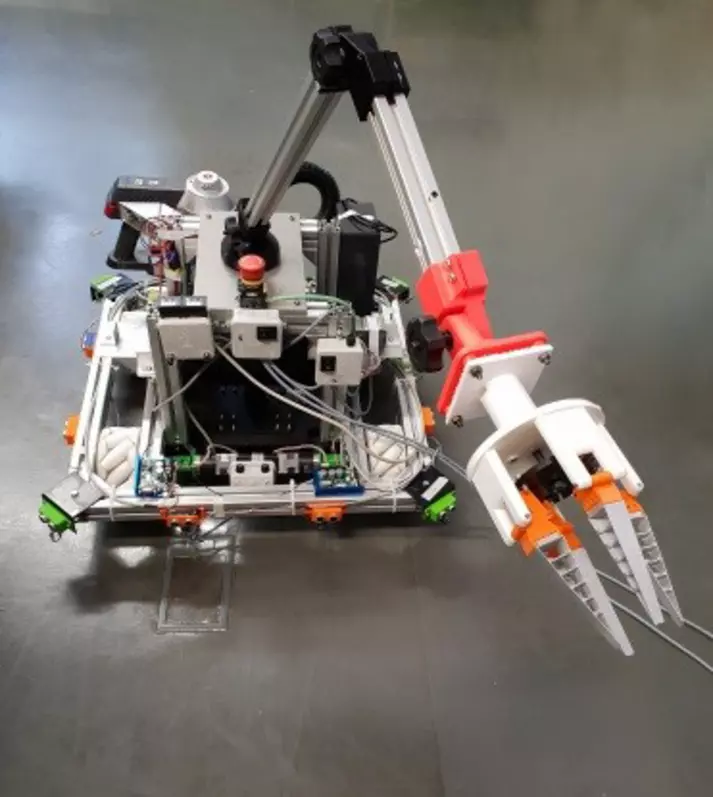
Pick’n’Place-Knickarmroboter
Ein Team von Schülern der HTL Rennweg hat einen Pick’n’Place-Roboter mit fünf drehbaren Achsen gebaut. Der Roboter kann einen Gegenstand aufnehmen und an einer anderen Stelle wieder ablegen.
Damit der Roboter sich bewegen kann, setzte das Team zwei bürstenlose DC-Servomotoren mit integriertem Controller vom Typ PD4-C6018L4204-E-01 und das High-Torque-Planetengetriebe GP56-S1-3-SR von Nanotec an den beiden Hauptachsen ein.
Der Knickarmroboter ist recht flexibel und zusätzlich mit Elektromagneten als „Greifer“ ausgestattet, um nicht magnetisch aufhebbare Teile greifen zu können. An den restlichen drei Achsen baute die Gruppe Modellbau-Servos mit leichtem Eigengewicht ein. Dadurch war es möglich, die Motoren direkt an der jeweiligen Achse zu fixieren.
(Quelle und Fotos: Silas Amesmann)
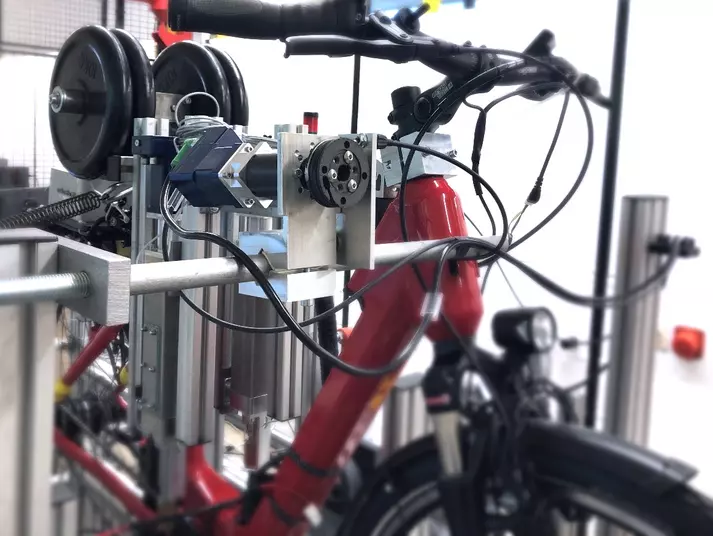
E-Bike-Prüfstand
Elektro-Räder sind schon länger kein Nischenprodukt mehr, das nur eine bestimmte Bevölkerungsgruppe nutzt. Daher steigt schon seit einiger Zeit die Nachfrage nach qualitativ hochwertigen E-Bikes. Um eine gleichbleibend hohe Qualität in der Herstellung der E-Bikes zu erreichen, hat die Hochschule Aalen einen Prüfstand entwickelt, mit dem das Fahrrad als Gesamtsystem in Bezug auf seine Qualität getestet werden kann. Denn bislang sind bei diesen Versuchen mehrheitlich Komponentenversuche verbreitet, die die Realität nur in einem begrenzten Maß nachstellen.
Das Alleinstellungsmerkmal dieses Prüfstandes ist, dass das menschliche Tretverhalten 1:1 abgebildet wird. Die Simulation wird durch eine intelligente sinusförmige Regelung der Antriebsmomente der Motoren ermöglicht, die den menschlichen Wiegeschritt simulieren.
Das Gangschaltverhalten des Fahrradfahrers wird durch einen Nanotec-Schrittmotor des Modells PD2-N4118L1804-IP-2 (NEMA 17) abgebildet. An diesem Motor ist der Seilzug der Gangschaltung über eine Rolle gekoppelt, die das Seil des Gangschaltzuges aufwickelt. Über die Winkeländerung der Abtriebswelle wird die zu dem jeweiligen Gang zugehörige Seilzuglänge eingestellt.
Diesen Schrittmotor mit integriertem Controller konfigurierte das Team der Fakultät Maschinenbau und Werkstofftechnik mit der Nanotec-eigenen Software NanoPro und steuerte diese über einen PC an.
(Quelle und Fotos: Özben Sarikurt)
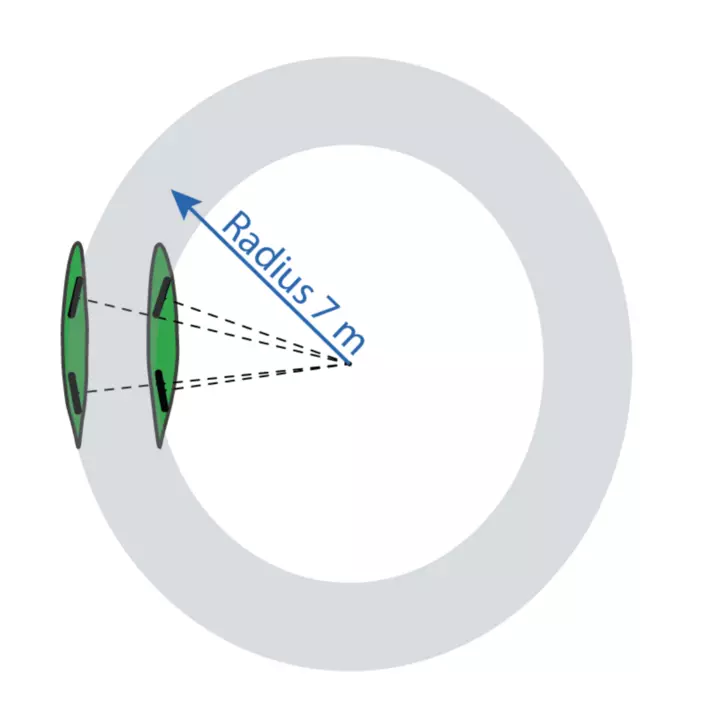
Bodenstation zum Satellitentracking
Die Gruppe Space Technology e.V. der TU Darmstadt ist eine akkreditierte Hochschulgruppe, die die studentische Raumfahrtforschung vorantreibt. Seit ihrer Gründung entwickeln die 35 Studierenden einen Kleinsatelliten, einen sog. CubeSat.
Ziel der Satellitenmission ist die Demonstration neuartiger Technologien, die zur Reduktion der Gefahren von Weltraumschrott beitragen. Um mit dem Satelliten CubeSat kommunizieren zu können, baute das Team eine Bodenstation, die durch genaue Ausrichtung einer Antenne den Funkkontakt ermöglicht. Die Nachführung der Antenne wird über zwei Achsen gewährleistet, angetrieben von dem IP65-zertifizierten Schrittmotor AS5918L4204-EB von Nanotec. Um die nötigen Drehmomente bei gleichzeitig geringem Winkelspiel erreichen zu können, verwendet die Gruppe die Nanotec-Präzisionsplanetengetriebe GPLE60-2S-32.
(Quelle und Fotos: Fabian Burger)

Automatische Leuchtenmessung für Flughäfen
Hinter dem Projekt „reLight“ steckt eine Vorrichtung zur Messung von Leuchten, die vier Schüler der HTL Rennweg in Wien entwickelt haben. Die Leuchten sind im Rollfeld eines Flughafens eingebaut und müssen regelmäßig gewartet werden, um den Vorgaben zu entsprechen und zudem die geforderte Sicherheit zu gewährleisten. Dabei wird ihre Helligkeit aus verschiedenen Positionen gemessen. Da manche Leuchten nicht mittig in der Fassung sitzen, muss ein mechanischer Ausgleich des Versatzes erfolgen. Der non-captive Linearaktuator LA421S14-A-UKBN von Nanotec erfüllt diese Anforderung präzise und vollautomatisch.
Die Messeinrichtung des Teams wird auf österreichischen Kleinflughäfen eingesetzt, da sie eine gute Alternative zu den am Markt erhältlichen Modellen ist.
(Quelle und Fotos: Matthias Gerber)

Autonome Lenkung für Rennwagen
Elektrisch angetriebene Rennwagen baut das Team der e-gnition Hamburg an der Technischen Universität Hamburg (TUHH) seit 2011. Die Gruppe besteht aus etwa 60 Studierenden und nimmt regelmäßig an der Formula Student, dem größten Ingenieurwettbewerb der Welt, mit Erfolg teil. In der Saison 2020 trat die Mannschaft erstmals mit dem gleichen Wagen und einem kombinierten Konzept in den Driverless und den elektrischen Wettbewerben an.
Diverse Motoren und Regler kommen in der autonomen Lenkung des Rennwagens zum Einsatz und halten den Wagen dank Nanotec auf Kurs. In der Saison 2021 nutzten die Studierenden den Controller CL4-E-2-12 , um den im Lenkrad verbauten Elektromotor zu treiben, der die Lenkung genauso wie ein Fahrer betätigt.
Viele weitere technische Details sowie Fotos finden Sie unter https://en.egnition.hamburg/
(Quelle und Fotos: Ole Ramming)

Mars-Rover
Die STAR Dresden e.V. ist eine studentische Arbeitsgruppe für Raumfahrt an der TU Dresden. Sie besteht aus ca. 30 Mitgliedern verschiedener Studiengänge, wie z.B. Ingenieurswissenschaften, Physik oder Medizin. Die Gruppe entwickelte einen Mars Rover und nahm damit an der European Rover Challenge (ERC) in Polen teil. Bei diesem Wettbewerb traten Studententeams aus aller Welt mit ihrem selbstgebauten Rover und unterschiedlichen Aufgabenstellungen gegeneinander an.
Der Mars Rover der Star Dresden e.V. trägt den Namen ELECTRA (Expeditionary Lightweight Extraction Collection Transportation Rover Assistant). Das Fahrzeug sollte einen Einsatz auf dem Mars simulieren und den Astronauten auf der nachgestellten Marsoberfläche unterstützen. Das Team befand sich in einem separaten Zelt und steuerte den Rover aus der Ferne. Dieser sollte u.a. Bodenproben aufnehmen, fotografieren, Schalter an einer Schalttafel umlegen oder einen Starkstromstecker anschließen – und das möglichst autonom und auf engstem Raum. Außerdem durfte er sich nur mit Hilfe von QR-Codes orientieren und musste einem vorgegebenen Weg in schwierigem Gelände folgen.
Der Rover besitzt vier Räder für die Mobilität. Die Räder sind um ihre vertikale Achse nahezu 360° drehbar. Für die Lenkung des Rovers baute das Team den bürstenlosen DC Motor DF45L024048-C2 mit angebautem Leichtbau-Planetengetriebe GPLK42-56 von Nanotec ein. Für den Antrieb wurde der bürstenlose DC-Motor DF45L024048-A2 nebst angebautem High-Torque-Planetengetriebe GP42-S2-46-SR eingesetzt.
(Quelle und Abbildung: Elias Ortlieb)

E-Trailer
Die Projektgruppe „E-Trailer“ der Rudolf-Diesel-Fachschule für Techniker in Nürnberg hat einen selbstfahrenden Anhänger geplant, konstruiert und gebaut. Damit der E-Trailer selbstständig fahren kann, bekam er einen eigenständigen elektrischen Antrieb, der an der Hinterachse montiert wurde. Als Lenkung dient dabei das Vorderrad, das ebenfalls über einen Motor angesteuert wird. Der Anhänger kann autonom lenken, bremsen und Abstand einhalten.
Für die Lenkung der Vorderachse benötigte das vierköpfige Projektteam einen Schrittmotor mit Gleichspannung (24 – 48 V). Dafür wählte es den bürstenlosen DC-Motor mit integriertem Controller PD4-C5918M4204-E-01 und das High-Torque-Planetengetriebe GP56-S1-7-SR von Nanotec.
(Quelle und Abbildung: Sebastian Blank, Maximilian Lenk, Andreas Ortner und Philipp Geitner)

Automatisiertes Gewürzregal
Im Rahmen des SIA-Projekts (Schüler-Ingenieur-Akademie) haben Schüler des Rosenstein-Gymnasiums ein automatisiertes Gewürzregal geplant, konstruiert und umgesetzt. Dieses soll, mit Hilfe der Ansteuerung über einen Mikrocontroller (Arduino), automatisch Regalfächer anfahren und die sich dort befindenden Behälter über eine Luke ausgeben.
Dank dem Einsatz der Schrittmotoren von Nanotec ((1x ST8918L4508-B, ST5918S1008-A und ST4118L1206-A) konnten die Schüler das Bewegungskonzept des Gewürzautomaten optimal realisieren.
Quelle und Fotos: Jens Gruberer

Autonomes Lenksystem
Das Global Formula Racing Team ist ein international studentisches Rennteam der Dualen Hochschule Baden-Württemberg, Ravensburg, und der Oregon State University, USA. Hier bauen Studenten gemeinsam zwei Rennbolide und treten auf internationalen Wettbewerben gegen andere Teams von mehr als 500 Universitäten an.
Bei der Formula Student Germany auf dem Hockenheimring und der Formula Student Spain auf dem Circuit de Barcelona-Catalunya konnte das Team der DHBW Ravensburg trotz des noch jungen Designs gut abschneiden.
Eine der vielen Herausforderungen, die beim Bau des Fahrzeugs vom Team bewältigt wurden, war die Konstruktion und Auslegung eines Lenksystems. Dieses musste den Anforderungen zur Verwendung auf der Rennstrecke genügen. Hier konnte sich das Team auf die Unterstützung von Nanotec Electronic verlassen, die den Steering Motor mit zwei PD6-CB87S048030-E-098 zur Verfügung stellte. Erst dank diesem DC-Motor war es möglich, ein funktionstüchtiges Auto mit dem Lenkverhalten eines menschlichen Fahrers im autonomen Modus nachzubilden.
Quelle und Foto: Marko Bausch
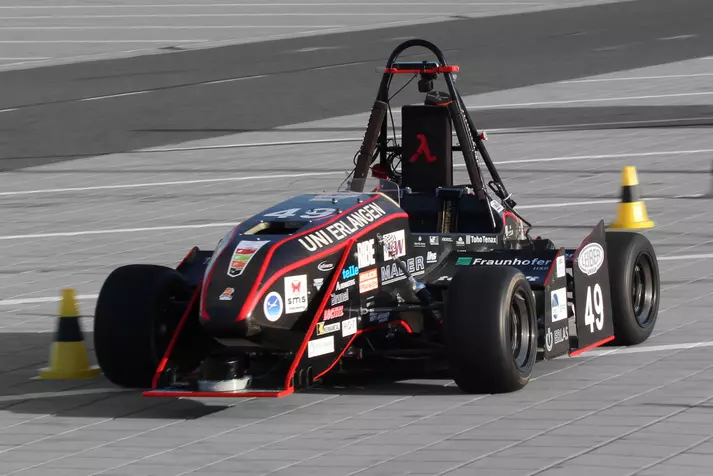
Automatisierte Lenkung
Das Driverless Team von High-Octane Motorsports e.V. der Universität Erlangen-Nürnberg hat in einem Jahr einen gewöhnlichen Kart in ein autonom fahrendes Auto umgebaut. Unter anderem wurden weitere Sensoren, eine Recheneinheit und elektrische Aktoren zur Steuerung des Fahrzeuges hinzugefügt. Die Aktuierung des passiven Bremssystems geschieht über die Ansteuerung mittels Schrittmotoren. Das Team setzte für diesen Zweck den Schrittmotor ST4118D1804-B aus dem Hause Nanotec ein. Für weitere wichtige Komponenten wie die Lenkung, an die jeweils hohe Anforderungen im Bereich Agilität, Kraft aber auch Verlässlichkeit gestellt werden, verwendete das Team den Schrittmotor ST6018L3008-A mit Getriebe GPLE60-1S-8. Dadurch konnten leistungsstarke und bauraumoptimierte Konstruktionen umgesetzt werden.
Quelle und Fotos: Richard Stierstorfer
Fußballspielender Roboter
An der DHBW in Mannheim entwickeln die TIGERS kleine, fußballspielende Roboter, die an der jährlichen WM der RoboCup Federation teilnehmen.
Die Roboter sind von Grund auf selbst konstruiert und spielen komplett ohne menschlichen Eingriff. Bei der letzten WM wurden die TIGERs Mannheim mit dem „Excellence Award" für herausragende wissenschaftliche Beiträge und für die Gesamtleistung geehrt.
Bei der vierten Robotergeneration wurde der Motor durch eine leistungsstärkere Variante ersetzt: Der DF45L024048-A2 mit 65 Watt ist für diesen Zweck ideal, da der Bauraum so stark begrenzt ist, dass die kleinere Anschlussplatine der A2-Variante einen großen Unterschied macht.
Quelle und Fotos: Andre Ryll
3-Achsen-Präzisionspositioniersystems
An der FH Südwestfalen in Iserlohn entwickelte ein Studierender einen Mikrodispenser mit einem 3-Achsen-Präzisionspositioniersystem. Dieser Mikrodispenser verwendet ein neuartiges Verfahren der Flüssigkeitsdosierung, das eine sehr geringe Menge dispensieren kann.
Der Dispenser ist unabhängig von der Viskosität, da die Flüssigkeit nicht durch eine Hohlnadel dosiert wird. Außerdem entfallen dadurch häufig auftretende Reinigungsprozesse. Im Mikrodispenser wurde der Open Loop Schrittmotor Controller C5-01 von Nanotec eingesetzt.
Quelle und Fotos: Aingharann Pathmanathan

Inverser Pendel mit speicherprogrammierbarer Steuerung
An der Technischen Hochschule Nürnberg haben Studierende ein inverses Pendel mit speicherprogrammierbarer Steuerung gebaut. Der starre Pendelstab ist in seinem Aufhängepunkt frei drehbar gelagert. Durch ein geregeltes Vor- und Zurückbewegen des Lagerpunktes kann der Stab im stehenden Zustand gehalten und Störeinflüsse ausbalanciert werden. Die Regelungsaufgabe ist also die Stabilisation des Pendelstabes in seiner oberen instabilen Gleichgewichtslage.
Es wird eine Linearachse genutzt, um den Aufhängepunkt des Pendelstabes zu bewegen. Als Antriebssystem kommen der Schrittmotor AS5918L4204-ENM24 und der Motorcontroller N5-1-1 der Firma Nanotec zum Einsatz.
Durch die Verwendung der Closed Loop-Technologie können zahlreiche Vorteile genutzt werden:
- ruhigerer Motorenlauf
- schnelleres Beschleunigen
- präzisere Positionierung
- geringere Erwärmung des Motors
Quelle und Fotos: Simon Northoff

Autonomes Fahrzeug
Beim Designwettbewerb „Formula Student” nehmen Studierende aus der ganzen Welt teil, die einen Formel-1-Prototypen entwickeln. Dieses Jahr implementierte das Formel 1-Studenten-Team der Universität Rom ein ETC-System in das Auto namens „Gajarda AWD". Dieses Fahrzeug wird durch eine Verbrennungskraftmaschine mit einem Allradantrieb angetrieben.
Im Auto wurde der High-Torque-Schrittmotor ST2818L1404-A von Nanotec als zentraler Antrieb eingesetzt. Dank des Motors werden die Ausfallsicherheit und Präzision des Drosselventils garantiert.

Force-Feedback Joystick
Studenten der Universität Kassel kamen auf die Idee, den Fieseler Storch-Flugsimulator zu bauen. Der Simulator besitzt in seiner derzeitigen Version eine 180°-Leinwand, die den Piloten in die Simulation eines propellergetriebenen Flugzeugs aus dem Jahr 1936 eintauchen lässt.
In der nächsten Ausbaustufe wird ein haptischer Joystick integriert, der die auf Ruder und Klappen wirkenden Windkräfte simuliert. Zur Realisierung des Feedbacks werden zwei Schrittmotoren der Firma Nanotec (PD4-C6018L4204) verwendet. Die Kräfte werden mittels Zahnriemen im Verhältnis 1:5 übertragen.
Quelle und Fotos: Daniel Strawe

Ein Team aus sechs Studenten der Hochschule Augsburg hat für das „Fritz-Felsenstein-Haus“ eine Maschine zum Malen von Farbmustern entwickelt und gebaut. In der Einrichtung leben Menschen mit Behinderungen verschiedener Art.
Das Projekt „Farbenschleuder“ setzt den High-Torque-Schrittmotor ST8918M6708-B von Nanotec ein. Der Motor treibt einen Drehteller an. Auf diesem hat das Studententeam ein Blatt Papier befestigt. Auf das Blatt wird über einen Linearschlitten mithilfe von Pumpenelementen Farbe getropft. Durch die Rotationskräfte fließen die Farbtropfen nach außen und je nach Geschwindigkeit und Applikationsposition entstehen so ganz individuelle Muster. Die Geschwindigkeit kann man nach dem Start am Touchscreen-Display einstellen. Die drei Tasten im Bild sind für die Farbauswahl, Spindelposition und zum Auftragen der Farbe gedacht und ermöglichen eine einfache Bedienbarkeit.
Quelle und Fotos: Patrick Lebmeier
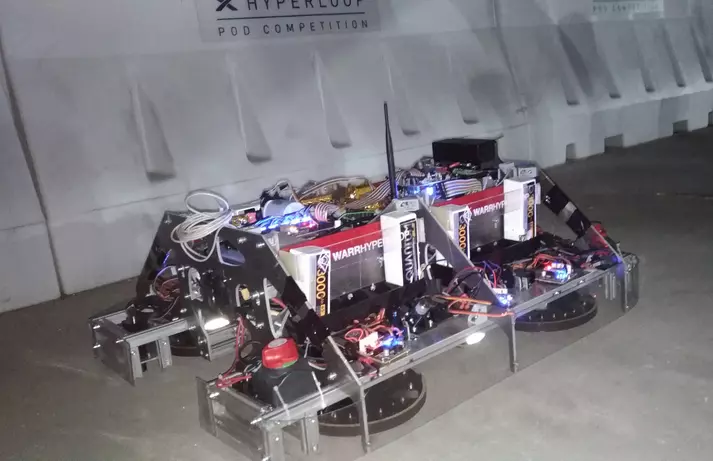
Das Team WARR Hyperloop baute an der Technischen Universität München einen schwebenden Pod. Vier Linearaktuatoren heben den Pod an, so dass dieser die Schwebeantriebe starten kann. Diese Aufgabe übernehmen vier Linearaktuatoren L3518S1204-T6X1-A25 in Baugröße NEMA 14 von Nanotec.
Drehen sich die Antriebe, werden die „Nanotec-Beine“ automatisch eingezogen und der Pod schwebt magnetisch. Es können dann bis zu 50 kg Nutzlast transportiert werden.
Quelle und Foto: Domenik Radeck
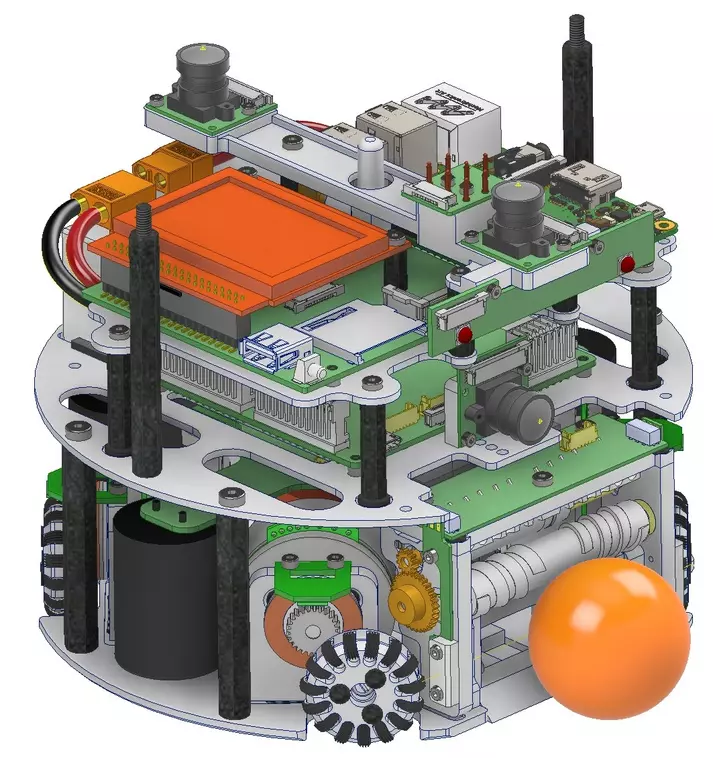
Die Studierenden der Hochschule München haben im Sommersemester 2017 einen Haushaltsroboter entwickelt, der sich autonom fortbewegen und zudem saugen kann. Der Roboter ist mit einem Greifarm ausgerüstet, um Gegenstände fassen und transportieren zu können.
Die Studierenden haben in den Arm des Roboters den High-Torque-Schrittmotor ST5918L2008-B in Baugröße NEMA 23 wie auch das Schneckengetriebe GSGE60-25-1 von Nanotec eingebaut.
Quelle und Fotos: Philipp Heckenmüller
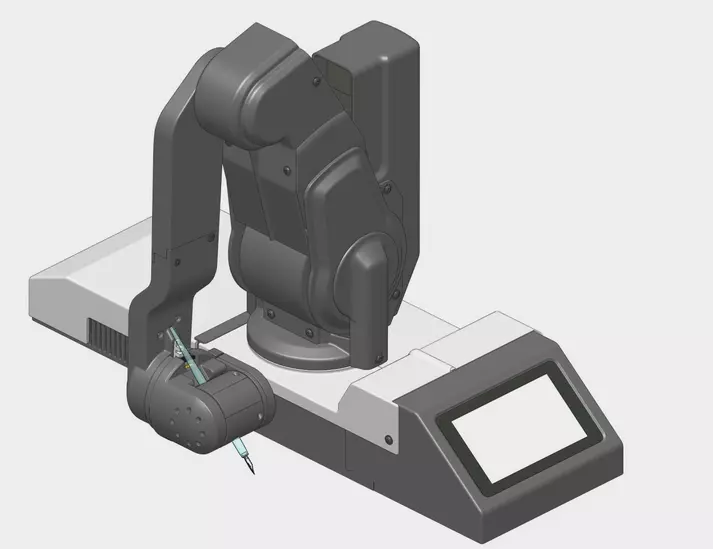
Das Studentenprojekt „Manuskripter“ ist ein Schreibroboter, der Handschriften nachahmen kann. Der Schreibkopf des Roboters wurde mit BLDC-Motoren von Nanotec ausgestattet. Als Innenläufermotoren wurden die leistungsstärksten BLDC-Motoren in der Größe DB59 eingesetzt.
Damit sich der Roboter aus jeder möglichen Position wieder herausheben kann, benötigen die beiden großen Motoren (Achse 1 und 2) ein minimales Drehmoment von 21 Ncm, und der kleinere Motor (Achse 3) eines von 4.5 Ncm: Dieser Fall tritt ein, sobald der Roboter-Arm rechtwinklig ganz ausgestreckt ist.
Quelle und Foto Mathias Mettauer
Die Tourenskibindung „Easy Going“ ist ein Projekt Studierender der HTBLA Rennweg in Wien. Diese Skibindung besitzt eine automatische Stufenverstellung – je nach Berg- bzw. Hangsteigung. Im Automatik-Modus stellt sich die Bindung entsprechend der Steigung passend ein. Wählt der Tourengeher den manuellen Modus, kann er die Stufen je nach Wunsch per Knopfdruck auswählen.
Pro Bindung gibt es einen Motor, Akku, Microchip und ein Funkmodul. In der Bindung wurden zwei Linearaktuatoren von Nanotec LSA201S06-A-TDBA-102 in Baugröße NEMA 8 (20 mm) verwendet. Diese ermöglichen den Aufbau platzsparender Linearachsen.
Quelle und Fotos: Christopher Muhr
Das Team der HTL Rennweg Wien entwickelte im Robotik-Unterricht einen Zwei-Achsenroboter, der eine Kreidetafel (60 cm x 45 cm) wischt und abzieht.
Die Studierenden verwendeten für das Projekt den High-Torque-Schrittmotor ST5918M3008-A sin der Baugröße NEMA 23 und zwei Schrittmotoren ST4209L1704-A in der Baugröße NEMA 17 mit dem Economy-Planetengetriebe GPLE40 for the project. Der ST4209L1704-A ist dabei für die Bewegung in die X-Richtung zuständig, der Zweite und der Dritte für die Z-Richtung.
Quelle und Fotos: Lukas Satzinger
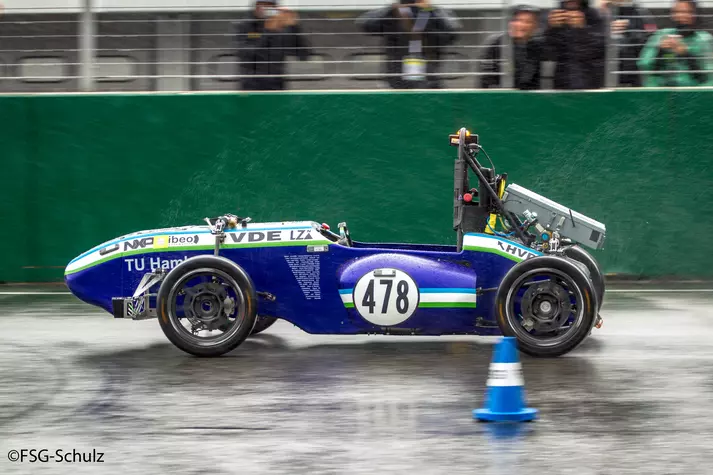
Innerhalb eines Jahres einen Rennwagen zu konstruieren, zu bauen und auf den Rennstrecken Europas über die Ziellinie zu bringen – das ist das Ziel der „Formula Student“. Das e-gnition Team der TUHH (Technische Universität Hamburg-Harburg) nimmt seit 2012 mit seinen elektrischen Rennwagen jedes Jahr an diesem Wettbewerb teil. Das Team setzt sich aus fast 60 Studierenden aller Studiengänge der TUHH zusammen. Im Jahr 2017 erreichte es den neunten Platz bei der „Formula Student Germany“, die jährlich auf dem Hockenheimring stattfindet.
Neu hinzugekommen ist 2017 die Driverless-Sparte, bei der es sich um den Umbau eines der existierenden Fahrzeuge zu einem komplett autonom fahrenden Wagen handelt. Um das existierende Fahrzeug in einen autonom fahrenden Rennwagen zu verwandeln, bauten die Studenten den bürstenlosen DC-Motor DB59S024035 von Nanotec ein. Dieser Motor wurde dazu eingesetzt, die Lenkwelle zu drehen und den Wagen autonom zu lenken. Er ersetzt somit die Hände des Fahrers, die das Lenkrad drehen würden.
Die Freude nach dem Rennen war groß, denn das Team von e-gnition konnte sich mit seinem Fahrzeug beim „Autonomous Design Award" erfolgreich auf Platz 3 der Weltrangliste positionieren.
Quelle und Fotos: Ole Ramming

13 Monate lang arbeiteten die 21 Studenten des Punch Powertrain Solar-Teams der Universität Leuven (Belgien) am Punch 2, ihrem neuen Solarauto, mit dem sie am 8. Oktober bei der Bridgestone World Solar Challenge in Australien starteten. Die Rennstrecke führte über eine Distanz von 3.000 km von Darwin bis nach Adelaide direkt durch das australische Outback.
Dieses Jahr wurden viele neue Features in das Solarauto eingebaut. So besitzt der Punch 2 jetzt ein einzigartiges 4-Rad-Lenksystem, das aus einem mechanisch entkoppelten Vorderrad- und Hinterradlenksystem besteht. Bis zu einem Lenkeinschlag von 90° ist nur die Vorderradlenkung aktiv. Wenn der Lenkeinschlagswinkel mehr als 90° beträgt, aktiviert sich zusätzlich die Hinterradlenkung. Die Lenkbewegung wird über Seilzüge an alle vier Räder übertragen.
Um das neue Test zu testen, wurde eine Kopie des Steuerungsystems gebaut, bei dem ein bürstenloser DC-Motor von Nanotec in Kombination mit einem Getriebe zum Einsatz kam. Dieser Antrieb wurde mit dem Steuerungsrad des Testaufbaus verbunden und simulierte die Lenkbewegungen, die während des Rennens zu erwarten sind. Die Lenkkraft wurde simuliert durch starke Federn, die mit Hilfe des Getriebes das erforderliche Drehmoment herstellen.
Quelle und Fotos: Martijn Schaeken
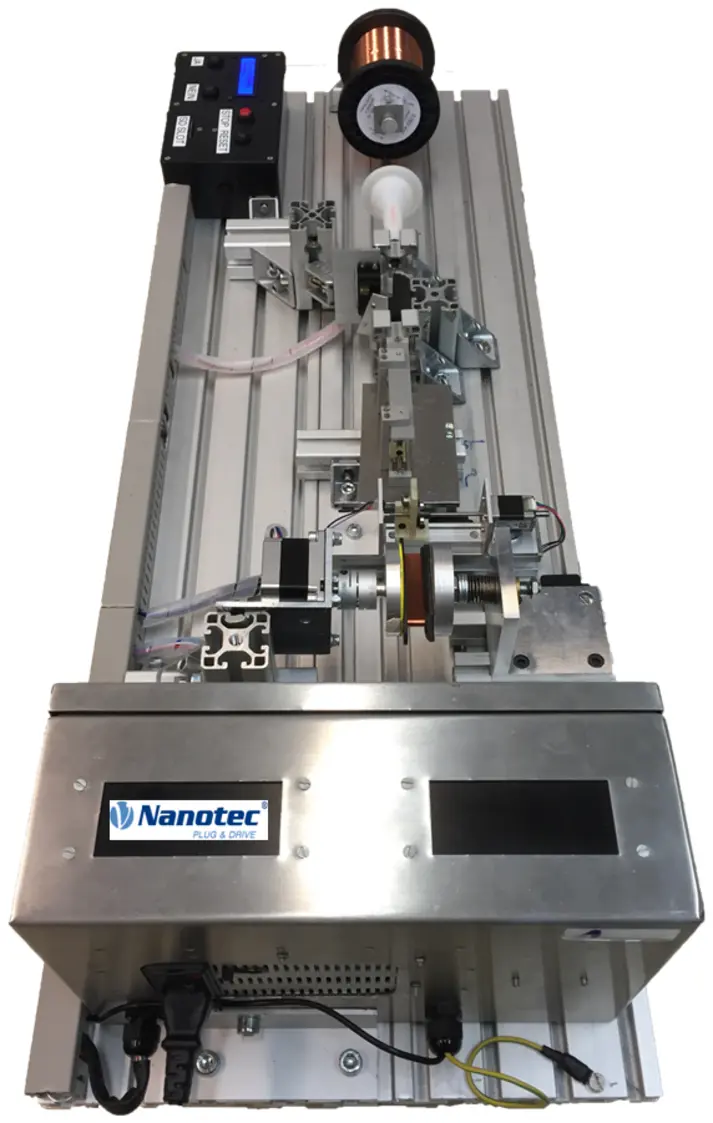
Im Studiengang Mechatronik/Feinwerktechnik der Hochschule München wurde von den Studierenden im Sommersemester 2016 im Rahmen der Lehrveranstaltung "Mechatronische Integration" eine automatisierte Wickelmaschine für verschiedene Gitarrentonabnehmer entwickelt.
Damit der Kupferlackdraht beim Aufwickeln auf den Spulenkörper nicht abreißt, wurde ein spezielles Federsystem entwickelt. Mit Hilfe der Steuerung SMCI35 konnte der zum Antrieb des Tonabnehmers verwendete Schrittmotor ST5918 so angesteuert werden, dass die Drehzahl mit zunehmender Wicklungsanzahl rampenförmig bis zu einem Schwellwert ansteigt, anschließend mit konstanter Drehzahl dreht und das Ende des Vorgangs abgebremst erfolgen kann.
Durch den Einsatz des Linearstellantriebs LS20 wird zudem ein kontinuierlicher Vorschub des Drahtes parallel zur Rotationsachse des Tonabnehmers über die gesamte Breite des Spulenkörpers erzeugt.

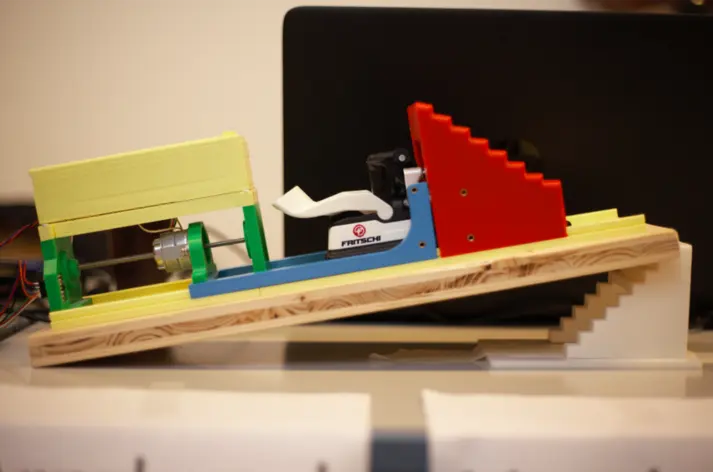
Von 14. bis 15. Mai 2016 fand die sogenannte Ecorace-Challenge im belgischen Brügge statt. Sieben Teams stellten dabei maßstabsgetreue Nachbauten eines Frachtschiffs vor, die in drei Kategorien bewertet wurden: Innovativstes Frachtschiff, bester Allround-Frachter und bestes Allround-Schiff (nicht Frachter). Außerdem wurde das Team mit dem besten Business Plan ausgezeichnet.
Die Preise für den innovativsten sowie den besten Allround-Frachter gewann das Team der Universität KU Leuven. Die Gruppe ließ „Galena“ zu Wasser – das Modell eines Frachters, der für die Binnenschifffahrt vorgesehen ist und so weiterentwickelt werden soll, dass er völlig autonom fährt. Für den Steuerantrieb der Galena verwendete das Ecorace-Team einen PD4-N5918L4204 und das Getriebe GPLE60-2S-16 von Nanotec.
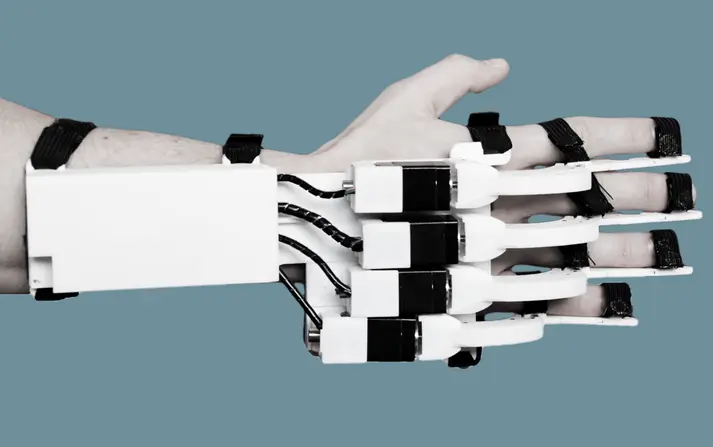
Wir gratulieren Dominic Libanio, Christian Schorr und Pascal Lindemann zu ihrem Sieg beim Landeswettbewerb „Jugend Forscht“ und zum 2. Platz beim Ideenwettbewerb Rheinland-Pfalz. Das von Nanotec mit Motoren unterstützte Projekt beschäftigt sich mit der Entwicklung eines Therapiegeräts für die Hand.
Häufig entsprechen die Ergebnisse nach Operationen an der Hand und der folgenden Therapie nicht den medizinischen Möglichkeiten, da die Bewegungstherapie aus Kosten- und Zeitgründen nur eingeschränkt verordnet und genutzt wird. Die Folgen können elementare Bewegungseinschränkungen und empfindliche Störungen der Feinmotorik an den Fingergelenken sein. Das Therapiegerät für die Hand soll den Arzt unterstützen und den Physiotherapeuten ergänzen. Jeder Finger erhält eine individuell angepasste Mechanik, die durch einen Nanotec-Linearmotor angetrieben wird.
An einer Hochschule in Berlin bekamen die Studierenden des Studiengangs Angewandte industrielle Elektrotechnik den Auftrag, einen Roboter zu entwickeln, der auf Grundlage eines selbstgeschriebenen PC-Programms eine Mauer in beliebiger Form baut. Innerhalb von sechs Monaten entstand daraufhin ein kabelloses, nahezu autonomes Konstruktionsfahrzeug, das von einem an Bord befindlichen ATmega32 gesteuert wird. Angetrieben wird das Fahrzeug von zwei innenliegenden Nanotec-Schrittmotoren, die jeweils ein an der Welle angebrachtes, außenliegendes Aluminiumrad antreiben. Dadurch ist eine punktgenaue Steuerung möglich. Zwei Schrauben, die vorne und hinten auf dem Boden aufliegen und bei der Fahrt gleiten, sorgen für Stabilität und tragen einen Teil des Fahrzeuggewichts. An der Front des Fahrzeugs befindet sich ein Linearaktuator, der an einer Linearführung und einer Gewindestange nach oben und unten fahren kann. An diesem ist ein Elektromagnet angebracht, der Holzbausteine, die mit einem Metallplättchen ausgestattet sind, anheben, in die richtige Höhe bringen und an einer vorgegebenen Stelle punktgenau wieder absetzen kann. Die Stromversorgung des Fahrzeugs wird mittels eines 12V Lithium-Polymer-Akkumulators sichergestellt. Über ein intuitiv zu bedienendes User-Interface wird es dem Benutzer ermöglicht, eine mehrlagige Mauer zu bauen, indem das Fahrzeug zwischen Basisstation und Baustelle hin- und herfährt.
Marc Zechel, Robert Fibich

Seit 2009 veranstaltet das Institut für Maschinenbau der Westfälischen Hochschule Gelsenkirchen jährlich einen Wettbewerb, im Rahmen dessen studentische Teams eine Maschine entwickeln, die eine vorgegebene Aufgabe erfüllen muss. In diesem Jahr bestand die Herausforderung darin, einen automatisierten Flaschenöffner für Kronkorken zu konstruieren, herzustellen und zu programmieren. Nach dem Öffnen der Flasche soll automatisch eine definierte Menge des Getränks in ein Glas gefüllt werden. Sieger des Wettbewerbs 2015 ist ein Flaschenöffner, bei dem das vierköpfige Konstruktionsteam den Linearaktuator LS4118S1404-T6x2-75 von Nanotec zum Öffnen der Flaschen gewählt hatte – entscheidend waren Schnelligkeit und Zuverlässigkeit.

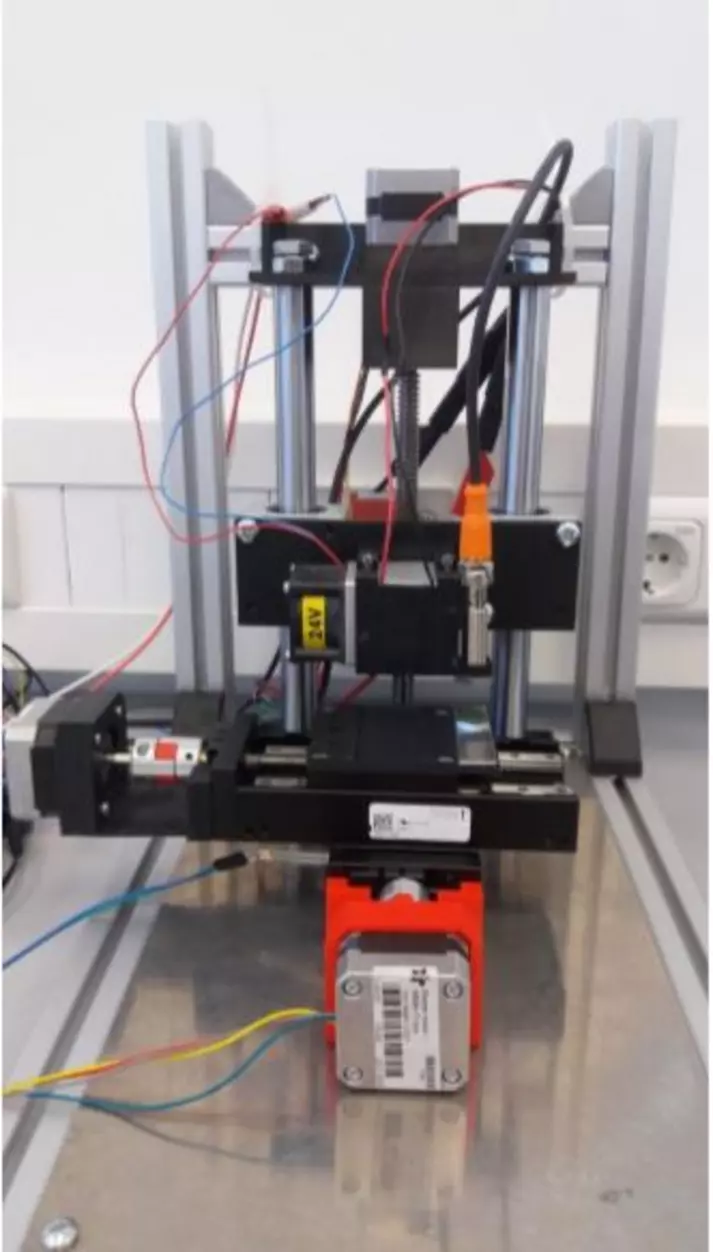
Im Projektmodul des Studienganges Mechatronik und Feinwerktechnik an der Hochschule München lautet die Aufgabe, aus einer Projektidee oder einem bereits existierenden Projekt ein fertiges Produkt zu bauen, inklusive Präsentation und Vorführung. Die Studierenden des Sommersemesters 2015 hatten sich vorgenommen, eine Schlauchpumpe mit einer Förderleistung von einem Liter pro Minute zu entwerfen, die Software dazu zu schreiben, die Pumpe aufzubauen und in Betrieb zu nehmen – mit der Vorgabe, die Kosten für den Nachbau unter 100 Euro zu halten. Das Team nutzte daher den 3D-Drucker der Hochschule München für die meisten Teile der Konstruktion, die Steuerung der Schlauchpumpe wurde mit einem Arduino Micro realisiert, der die Kommunikation mit dem PC, die Ansteuerung des Motors und das Auswerten der Sensoren übernimmt. Die Platine wurde im Elektroniklabor der Hochschule zusammengelötet und beherbergt den µC, Teile der Stromversorgung und den Motortreiber. Die Drehzahl wird mit Hilfe einer Lochscheibe überprüft und per Software ausgewertet. Damit der Nutzer die Pumpe bedienen kann, hat die Gruppe ein Frontend mit C-Sharp geschrieben. Die zentrale Schnittstelle zwischen der Software und dem konstruktiven Teil der Schlauchpumpe bildet ein Schrittmotor von Nanotec.

Am Institut für Angewandte Theaterwissenschaft der Justus-Liebig-Universität Gießen wurde als Studierendenprojekt der Nachbau einer Volksfest-Spielbude entwickelt – das „Kentucky Derby“. Bei diesem Geschicklichkeitsspiel geht es darum, ein mechanisches Pferd durch geschicktes Manövrieren von Spielbällen ins Ziel zu bringen. Im Unterschied zum Vorbild gibt es bei diesem Projekt jedoch keine direkte Interaktion, die Spielteilnehmer können also nicht direkt in das Spielgeschehen eingreifen. Stattdessen sitzen sie in einem separaten Raum und werden vom Spielleiter über eine Kamera beobachtet. Je engagierter sie sich zeigen, um ihr Pferd anzutreiben – beispielsweise durch Rufen oder Klatschen –, desto weiter wird das Pferd vom Spielleiter vorwärts bewegt. Für den Antrieb der Pferde wurden Schrittmotoren vom Typ PD4-N6018L4204 verwendet, die über die gleiche Software gesteuert werden wie das Licht und Ton – eine ideale Kombination aus mechanischen Elementen und audio-visuellen Medien.

Nanotec Electronic unterstützt das Hochschulprojekt MALOMAT an der Hochschule Augsburg. Studenten des Studiengangs Mechatronik entwickelten eine Anlage, mit deren Hilfe schwerstbehinderte Kinder eine Leinwand eigenständig bemalen können.
Im Fritz-Felsensteinhaus in Königsbrunn, eine Schule für körperlich und geistig eingeschränkte Kinder, spielt das Malen eine große Rolle im Unterricht. Dies gelingt oft nur unter großem Aufwand, da die Kinder normale Leinwände nicht selbstständig bemalen können. Sie wählen eine Farbe und zeigen ihren Betreuern an, an welcher Stelle die Leinwand bemalt werden soll. Die Lehrer benutzen dafür Farbtuben und lassen die Farbe an der gewählten Stelle die Leinwand hinunterlaufen.
Mit Hilfe des MALOMAT können die Schüler selbstständig auf der Leinwand malen. Nach kurzen Vorbereitungsarbeiten lassen sich Linien in drei verschiedenen Farben malen. Die Steuerung der zwei Programme kann vollständig durch einen oder mehrere Schüler erfolgen, wobei auch unterschiedliche Schwierigkeitsgrade möglich sind. Nanotec hat das Projekt mit einem Getriebmotor und einer Steuerung unterstützt.

Im Studiengang Mechatronik der Hochschule Karlsruhe wurde von den Studierenden im Wintersemester 2014/2015 im Rahmen einer Projektstudie ein Roboter für das Spiel Tischhockey entwickelt. Der Roboter soll dabei einen Mitspieler ersetzen und gegen einen „menschlichen“ Gegner spielen. Dabei sollte der Roboter vollständig autonom agieren und auch Entscheidungen bezüglich der Spielsituation selbstständig treffen können. Sowohl die Puckposition als auch seine Geschwindigkeit werden über ein Sensorsystem erfasst und durch eine Auswerteelektronik verarbeitet. Die Daten werden anschließend an den mechanisch angesteuerten Spielschieber weitergegeben werden, so dass dieser eine bestimmte Position anfahren und den Puck zurückspielen kann. Um den Schlitten zu bewegen, an dem der Spielschieber befestigt ist, werden Schrittmotoren von Nanotec eingesetzt. Der ST5918L4508 liefert das richtige Drehmoment für diese Anwendung und wird hier mit der Steuerung SMCI35 betrieben.
Quelle und Foto: Jakob Bokemeyer, Sergej Krohmer, Tobias Sperling, Urs Wetzel, Simon Wörner (Hochschule Karlsruhe)

Ein Projekt der nicht alltäglichen Art wurde mit sechs SMCI36 und SCMI35 Schrittmotor-Steuerungen der Nanotec Electronic GmbH & Co. KG realisiert: Eine Drachen-Windkraftanlage.
Gebaut wurde sie von acht angehenden Wirtschaftsingenieuren der Dualen Hochschule Baden-Württemberg Heidenheim, die damit gleich den Baden-Württemberg Challenge des European Satelite Navigation Competition 2011, auch als „Galileo Masters“ bekannt, gewonnen und als europaweit bestes Team abgeschnitten haben.