
Brushless direct current motors, abbreviated as BLDC motors, are – despite their name – three-phase current synchronous machines: the rotor follows a magnetic rotational field and the movement is synchronous to the AC voltage applied to the windings. This motor type is frequently referred to as "brushless direct current motor" because, in many applications, it replaces direct current motors with brushes (brushed DC or commutator motors). In a brushed DC motor, direct current voltage is applied, generating a speed-independent alternating current by means of a mechanical inverter in the motor – the brushes.
Together with an electronic drive controller, which takes control over the function of the brushes and converts the fed-in direct current into an alternating current, the BLDC motor delivers performance comparable to that of a brushed DC motor – without the brushes, which have a limited service life. BLDC motors are therefore also referred to as EC (electronically commutated) motors in order to distinguish them from mechanically commutated motors with brushes.
Another commonly used term is PMSM, which stands for permanent magnet synchronous motor. Here, "permanent magnet" is used to distinguish itself from other synchronous motors that operate with a field winding on the rotor, whereas the BLDC is permanently energized. In other words, the motor rotor generates a magnetic field by means of a permanent magnet even if the stator is not energized.
The terms PMSM and BLDC are frequently juxtaposed in order to distinguish between PMSM motors with sinusoidal induced voltage (back-EMF) and BLDC motors with trapezoidal induced voltage (see below). Today, most BLDC motors exhibit a sinusoidal back-EMF.
1. Structure/types
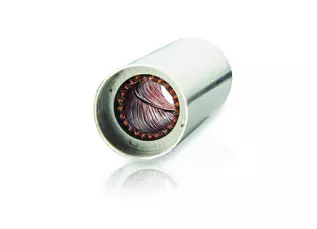
Most BLDC motors are "internal rotor motors" in which the rotor is rotated by permanent magnets on a shaft in a stationary stator with coils. With "external rotor motors" the stator is located on the inside and the rotor consists of an externally rotating bell-shaped housing in which the magnets are mounted.
The advantages of internal rotor motors lie in their low rotor inertia and the superior dissipation of lost heat. By contrast, with external rotor motors, the heat-generating coils are insulated against their environment by the rotor housing and magnets. Due to their high rotor inertia torque and the fact that the rotor housing can only be balanced with difficulty, external rotor motors are unsuitable for very high rotational speeds.
Accordingly, internal rotor motors are used in the majority of industrial applications. External rotor motors display their advantages in series applications, as they are less expensive to produce. They can also be made shorter and usually have a lower detent torque, as well as a higher torque – thanks to the larger rotor diameter, at the same magnetic force.
Both motor designs are generally produced with three phases. However, there are also designs with one or two phases. In the following only the three-phase BLDC motors will be described, because Nanotec only produces these.
Both internal and external rotor motors are manufactured with slotted windings; here the winding wire is wound around the stator pole shoes (iron core), which allows the magnetic field lines of the winding to flow out and concentrate in a defined form. The stator is made up of thin, mutually offset insulated metal plates in order to keep the eddy current losses to a minimum.
Slotless BLDC motors are a special type of internal rotor motor that are very popular in very small motors. Their stators only consist of ring-shaped metal plates and a flat, bonded or encapsulated winding is affixed on the inside. Since there is no iron core, the inductance of the motor is very low and the current in the windings increases rapidly. In addition, iron losses are greatly reduced and the motors have a higher efficiency rating. During slow operation, the lack of torque ripple has a positive effect. Unlike standard BLDC motors, the magnetic field is not reinforced at the pole shoes and there is no detent torque. This design type is especially important for motors with a diameter of less than 40 mm, as their power density is significantly higher than that of slotted motors. This is due to the fact that, as a consequence of production, with slotted motors a relatively large portion of the stator always remains empty between the windings. On the other hand, with slotless motors, this space can be completely filled with the copper winding. The smaller the diameter of the motors, the more important this advantage of slotless motors becomes.


2. Motor control/commutation
The BLDC motor rotates because the permanent magnet on the rotor attempts to align itself in the direction of the magnetic field generated by the electromagnets of the stator. While doing this, the torque is at a maximum when both magnetic fields are perpendicular to one another. The type of control is distinguished in two ways: in the form of the power supply of the windings (block-shaped or sinusoidal), or in the methods for identifying the rotor position. It is necessary to determine the rotor position because the currents in the windings must be timed to switch in such a way that the stator magnetic field is always perpendicular to the rotor magnetic field, i.e. it continues turning with the desired speed.
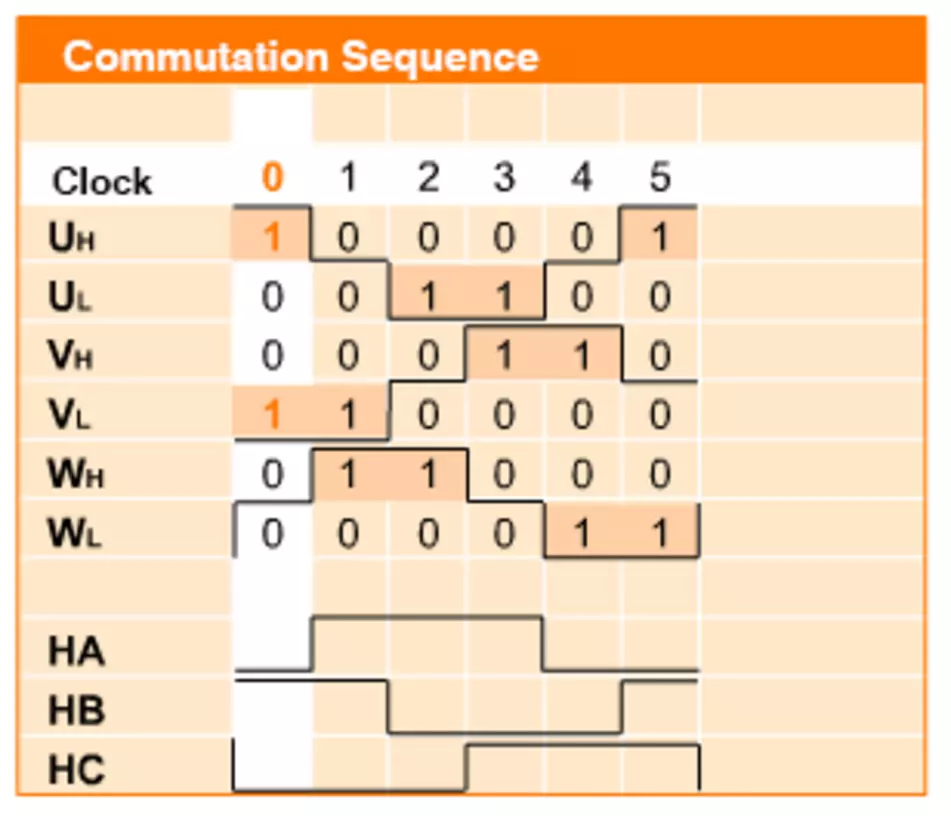
2.1 Block Commutation
The rotor position can be easily determined through Hall sensors in the motor. These can then be switched by a suitably aligned magnet on the rotor at the exact time the winding must be switched. The three windings then correspond to three Hall sensors; their states define how the windings must be connected. If the three windings are digitally switched, i.e. either there is no current or full current at the windings, this is referred to as block commutation. This combination of Hall sensors and block commutation is technically the easiest method to actuate a BLDC motor. What is disadvantageous about this technique is that the stator magnetic field, because of the discrete switching, is not always perpendicular to the rotor magnetic field. This is due to the alignment of the stator magnetic field remaining constant through 60°, whereas the rotor rotates further up to the next switching point. The Hall sensors are positioned in such a way that the stator magnetic field in the middle stands perpendicular between two switching points, thus resulting in a respective angle error of 30° at the switching points. As a result, the torque is 13.4% (1- cosine [30°]) lower. Consequently, with block commutation, there is a torque ripple at this peak, with six times the frequency of the electrical rotary frequency of the motor. This leads to vibrations and noises; especially at low speeds, the motor will not rotate evenly. This is why block commutation is unsuitable for applications in which the motors must – at least intermittently – run slowly (less than approx. 10% of the rated speed). On average, the torque ripple causes a loss of approx. 4.5% of the torque and also a corresponding worsening of the efficiency factor in comparison to a thermally equivalent, optimal power supply of the windings.
2.2 Sine commutation
The optimum form of energization is the sine commutation, whereby each winding of the motor is powered with a sine wave shifted by 120°, resulting in a continuously rotating stator magnetic field with constant strength. As a rule, if only Hall sensors are available for determining the rotor position, the sine commutation can also be used by interpolating between the switching points. In most cases, this directly leads to a significant improvement of the performance of the motor. In case of load changes between two Hall sensors, the sine wave cannot be adjusted, however, resulting in incorrect positioning of the magnetic field. This can only be corrected with the next Hall sensor signal.
The sine commutation therefore ideally requires a higher resolution system for determining the rotor position. Normally, this consists of an optical or magnetic encoder that determines the position of the rotor with sufficient precision at all times and correspondingly adjusts the current.
2.3 Field-Oriented Control
Sometimes field oriented control is still distinguished from sine commutation; often, however, both terms are used interchangeably. The terms are used interchangeably because the sine commutation, as described above, optimally controls the stator magnetic field.
As long as one leaves out how the current controller itself functions, the difference is not apparent in the description of the sine commutation. In the preceding it was assumed that a sinusoidal current value would be generated which, with sufficient speed, would be inputted into the winding by the current controller. Both tasks, the current value (which corresponds to the torque control loop) and the current control of the windings, are thus treated separately in the sine commutation or, respectively, are performed by separate controllers. In this case, however, the current controllers for the windings receive with increasing speed a current value that changes with higher frequency. At the same time, the increasingly strong influence of the back-EMF from the motor must be compensated for. Because the bandwidth of the current controller has an upper limit, at higher speeds there can be phase shifts and distortions of the current flows so that the stator magnetic field is no longer perpendicular to the rotor.
The field oriented control solves this problem by controlling the current vector directly in the rotating coordinate system of the rotor. For this, the measured current flows of the three phases are transformed through a Clark-Park transformation into the biaxial coordinate system of the rotor. Thus, the torque value will no longer be first converted into current values, as is the case with the sine commutation for the individual windings, which are then each separately controlled; but instead it is simultaneously controlled in a coordinate system of the rotor current level and orientation of the magnetic field. Subsequently, the current flows for the individual windings are calculated (through an inverse Clark-Park transformation). With this method the control is frequency-independent and, even at higher rotational speeds, will always produce optimum sinusoidal current.
2.4 Sensorless Control
Sensorless control is not an additional control method, but rather a term for methods which are capable of determining the rotor position without sensors (i.e. Hall sensors, encoders). These methods can be roughly broken down into two classes:
Simple sensorless control is based on the direct measurement of the back-EMF in the respective non-energized winding. Compared to standard control, however, this method requires special hardware and is instable below approx. 20% of the rated speed of the motor as the measurement signal is too small. Furthermore, this method only functions in combination with block commutation, because with sine commutation, all three coils are always simultaneously energized.
More sophisticated solutions are based on so-called "observer tracking", which reproduces values that are not directly measurable, such as the speed or back-EMF, from other values measured by the current controller. The core of this type of system is an extremely precise model of the motor that, in parallel with the actual motor, calculates from the known input values, such as the set PWM, those values which are also measured, such as the current level in the winding. The calculated values are then compared to the measured values in every cycle. Due to the observation error determined by using this method, the internal values of the motor model are constantly readjusted. With this method a more correct estimate is also obtained for the values that are not actually measured, such as the speed. Although this method only works because the reaction of the winding changes as a function of the speed due to the induced voltage, the directly measured values can be readily measured even at low speeds. The result is a "virtual encoder" that delivers the position and speed information, beginning at a certain minimum speed, with the same precision as an actual optical or magnetic encoder. As with this method, the back-EMF does not have to be directly measured, it can also be combined with sine commutation or the field oriented control.
What both sensorless methods have in common, is that no information on the rotor position is available when idle, thus a special startup method is required. Similar to a stepper motor, the motor is operated in the controlled mode for several commutation cycles until it has attained the required speed and the sensorless measurement can determine a rotor position.
3. Important Parameters
| No-load speed | Max. rotational speed of the unloaded motor, determined primarily by the voltage constant |
|---|---|
| No-load current | Current at no-load speed (consumption necessary to overcome the friction) |
| Rated speed/rated torque | Rated operating point |
| Peak torque | Momentarily attainable torque, usually 3x rated torque for approx. 5 s, then heat seizure => I2T |
| Torque constant (Nm/A) | Indicates the relationship between torque and current |
| Voltage constant (V/krpm) | Induced back-EMF per rotation |