





Diese Application Note zeigt, wie Sie über CANopen die Kommunikation zwischen Nanotec-Controllern herstellen. Per NanoJ-Programmierung können Sie einfache Master/Slave-Funktionalitäten einrichten, z.B. die Synchronisation zweier Controller ohne SPS.
PD4-EB59CD-E-65-4A – Bürstenloser DC-Motor mit integriertem Controller IP65 – NEMA 23

Verfügbarkeit
In den Warenkorb

PD4-EB59CD-E-65-4A wurde in den Warenkorb gelegt
Zubehör
| ZK-M12-5-2M-1-B-S | Strom gerade 2m |
|
|
| ZK-M12-12-2M-1-AFF | IO gerade 2m |
|
|
| Z-K4700/50 | Kondensator |
|
|
| ZK-M12-4-2M-1-D-RJ45 | Anschlusskabel M12 |
|
Bitte klicken Sie auf "Artikel kombinieren" oder das Pluszeichen, um den Konfigurator zu starten.
Technische Daten
-
Größe 56 mm
-
Feldbus Modbus TCP
-
Betriebsspannung 12 VDC - 48 VDC
-
Nennmoment 60 Ncm
-
Nennstrom (RMS) 6 A
-
Anzahl Digitaleingänge 6
-
Anzahl Analogeingänge 1
-
Anzahl Digitalausgänge 2
-
Encoder
-
Encoderauflösung 1024 Impulse pro Umdrehung
-
Gewicht 1.4 kg
-
NEMA 23
-
Schnittstelle -
-
Nennleistung 220 W
-
Nenndrehzahl 3500 U/min
-
Spitzenstrom (RMS) 18 A
-
Typ Digitaleingänge 5/24 V umschaltbar
-
Typ Analogeingang 0 - 20 mA / 0 - 10 V umschaltbar
-
Typ Digitalausgang open-drain (max. 24 V/100 mA)
-
Encodertyp singleturn absolut
-
Länge 123 mm
Abmessungen
Kennlinie
Belastungsgrenze:
Maximale kurzzeitige statische Belastung, die bei Berücksichtigung der Lebensdauer erreicht werden darf.
Maximale kurzzeitige statische Belastung, die bei Berücksichtigung der Lebensdauer erreicht werden darf.
|
Drehmoment
|
Ausgangsleistung
|
Wirkungsgrad
|
Eingangsleistung
|
Verlustleistung
|
Strohmaufnahme
|
Dauerbetriebsbereich
|
Drehmoment [nm] bei 377.70 U/min
|
|
|---|---|---|---|---|---|---|---|---|
| 48V |
|
n/a | ||||||
|
|
||||||||
Downloads
Datenblätter
Handbücher
Konformität
Zubehör
| ZK-M12-5-2M-1-B-S | Strom gerade 2m |
|
|
| ZK-M12-12-2M-1-AFF | IO gerade 2m |
|
|
| Z-K4700/50 | Kondensator |
|
|
| ZK-M12-4-2M-1-D-RJ45 | Anschlusskabel M12 |
|
Knowledge Base
Unsere Beispielprogramme zeigen Ihnen, wie Sie NanoJ-Codevorlagen zur individuellen Konfiguration von Nanotec-Motorcontrollern nutzen.
Die Beispiele und die Application Note zeigen Ihnen, wie die NanoJ Library die Verwendung der CiA 402 Power State Machine vereinfacht. Die Funktionen der Bibliothek sind in einer einzigen Header-Datei enthalten, die Sie in Plug & Drive Studio problemlos zu Ihrem NanoJ-Projekt hinzufügen können.

Closed Loop mit feldorientierter Regelung ermöglicht es, Schrittmotoren wie einen Servomotor laufen zu lassen, d.h. laufruhig, mit geringer Resonanz und positionsgeregelt.
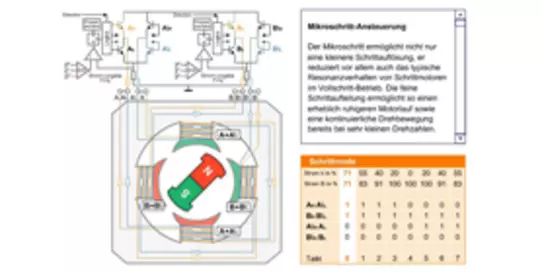
Die interaktive Animation veranschaulicht die Funktionsweise von Schrittmotoren. Sie startet, wenn Sie den Regler „Dauerlauf“ nach links oder rechts schieben. Alternativ können Sie sich auch Einzelbilder anzeigen lassen, indem Sie auf die Pfeile klicken.