Pin assignment
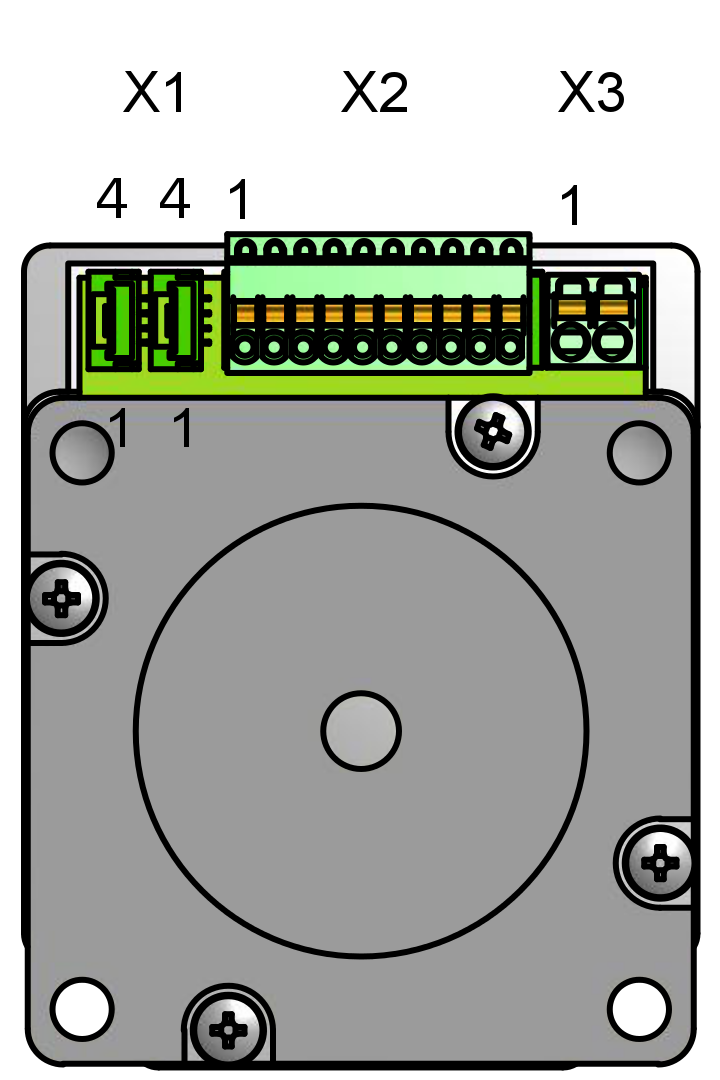
Overview
| Connection | Function | |
|---|---|---|
| X1 | CANopen IN/OUT and external logic supply | |
| X2 | Inputs/outputs | |
| X3 | Voltage supply | |
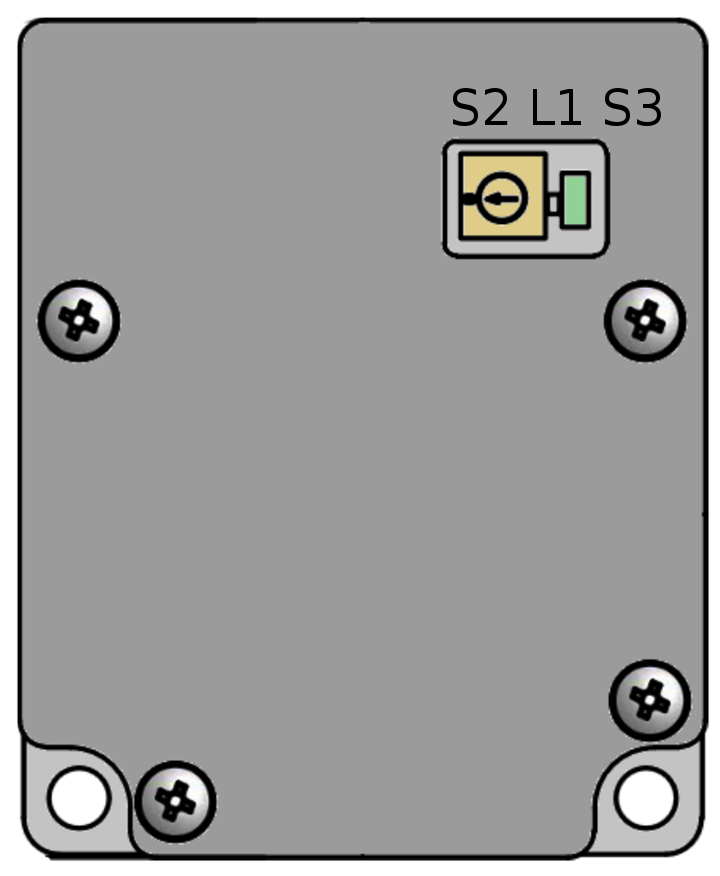
| S2 | Hex coding switch for node-ID and baud rate | |
| L1 | Power LED | |
| S3 | 120 ohm termination resistor (switch set to ON) | |
X1 – CANopen IN/OUT and external logic supply
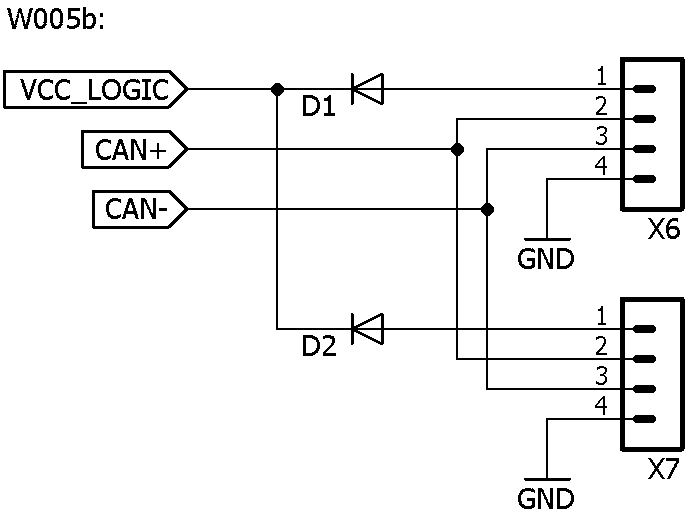
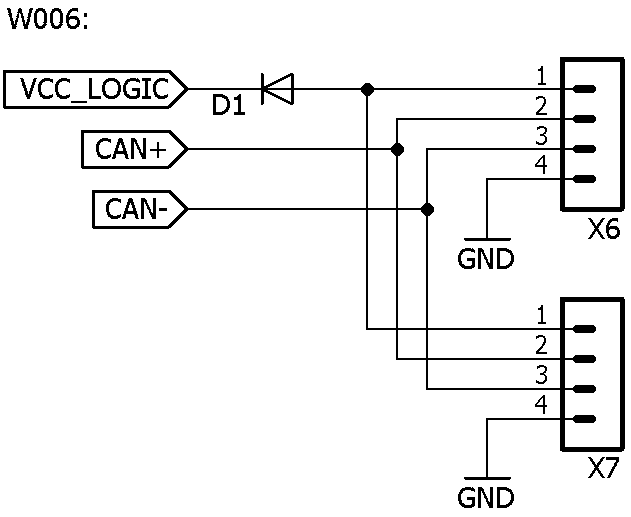
Connections for CANopen. Pin 1 is the pin that faces the motor axis. The contacts of both connectors are connected to one another; both connectors are thus equal.
Connector type: JST GHR
Suitable Nanotec cable: ZK-PD4-C-CAN-4-500-S (not included in scope of delivery)

| Pin | Function | Note |
|---|---|---|
| 1 | Vcc Logic | +24 V DC, input voltage, external logic supply for communication, current consumption: approx. 32 mA |
| 2 | CAN_H | CAN-High |
| 3 | CAN_L | CAN-Low |
| 4 | GND | This pin is connected to both connectors. |
Up to and including hardware version W005b, the pin 1s of both connectors are separated.
From hardware version W006 on, the pin 1s of both connectors are connected to one another.
Should the main supply fail, the logic supply keeps the electronics, the encoder and the communication interface in operation.
The windings of the motor are not supplied by the logic supply.
X2 – digital and analog inputs and outputs
Connections for the digital and analog inputs and outputs
- Type: Phoenix Contact MCV 0.5/10-G-2.5
- Mating connector (included in scope of delivery): Phoenix Contact FK-MCP 0.5/10-ST-2.5 (or equivalent)
- Nanotec article number: ZCPHOFK-MC0,5-10

| Pin | Function | Note |
|---|---|---|
| 1 | GND | |
| 2 | Analog input | 10 bit, 0 V - 10 V |
| 3 | Voltage output | +12 V DC output voltage, max. capacity 100 mA |
| 4 | Digital output 1 | Open drain, max. 24 V/100 mA |
| 5 | Digital output 2 | Open drain, max. 24 V/100 mA |
| 6 | Digital input 1 | 5 V / 24 V signal, switchable by means of software with object 3240h, max. 1 MHz |
| 7 | Digital input 2 | 5 V / 24 V signal, switchable by means of software with object 3240h, max. 1 MHz |
| 8 | Digital input 3 | 5 V / 24 V signal, switchable by means of software with object 3240h, max. 1 MHz; this input is used as "direction" input in "clock-direction mode" |
| 9 | Digital input 4 | 5 V / 24 V signal, switchable by means of software with object 3240h, max. 1 MHz; this input is used as "clock" input in "clock-direction mode" |
| 10 | GND |
| Max. Voltage |
Switching thresholds (worst-case calculations) |
|
|---|---|---|
| Switching on | Switching off | |
| 5 V | > 4.45 V | < 0.56 V |
| 24 V | > 16.93 V | < 5.27 V |
| Connection data | min | max |
|---|---|---|
| Conductor cross section, rigid, min. | 0.14 mm2 | 0.5 mm2 |
| Conductor cross section, flexible, min. | 0.14 mm2 | 0.5 mm2 |
| Conductor cross section, flexible, min. Wire-end sleeve without plastic sleeve, min. | 0.25 mm2 | 0.5 mm2 |
| Conductor cross section, min. AWG | 26 | 20 |
| Min. AWG acc. to UL/CUL | 28 | 20 |
X3 – voltage supply
Voltage source
The operating or supply voltage supplies a battery, a transformer with rectification and filtering, or a switching power supply.
Connections

- Type: Phoenix Contact MCV 1.5/ 2-G-3.5
- Mating connector (included in scope of delivery): Phoenix Contact FMC 1.5/ 2-ST-3.5 (or equivalent)
- Nanotec article number ZCPHOF-MC1,5-2
| Pin | Function | Note |
|---|---|---|
| 1 | +Vcc |
|
| 2 | GND |
| Connection data | min | max |
|---|---|---|
| Conductor cross section, rigid, min. | 0.2 mm2 | 1.5 mm2 |
| Conductor cross section, flexible, min. | 0.2 mm2 | 1.5 mm2 |
| Conductor cross section, flexible, min. Wire-end sleeve without plastic sleeve, min. | 0.25 mm2 | 1.5 mm2 |
| Conductor cross section, flexible, min. Wire-end sleeve min. Plastic sleeve min. | 0.25 mm2 | 0.75 mm2 |
| Conductor cross section, min. AWG | 24 | 16 |
| Min. AWG acc. to UL/CUL | 24 | 16 |
Permissible operating voltage
The maximum operating voltage is 50.4 V DC for the stepper motors (PD4-C) and 25.2 V for the BLDC motors (PD4-CB). If the input voltage of the controller exceeds the threshold value set in 2034h, the motor is switched off and an error triggered. Above the response threshold set in 4021h:02h, the integrated ballast circuit is activated (wirewound resistor Z32041412209K6C000 from Vishay with 3 W continuous output).
The minimum operating voltage is 11.4 V DC. If the input voltage of the controller falls below 10 V, the motor is switched off and an error triggered.
A charging capacitor of at least 4700 µF / 50 V (approx. 1000 µF per ampere rated current) must be connected in parallel to the supply voltage to avoid exceeding the permissible operating voltage (e.g., during braking).
S2 – CANopen node-ID and baud rate
Hex coding switch for setting the CANopen node-ID and baud rate. See chapter Setting node-ID and baud rate.
S3 – 120 ohm termination resistor
This DIP switch switches the termination of 120 Ω between CAN_H and CAN_L of the CAN bus on or off. The "up" switch position switches termination on.