





This application note shows how to establish communication between Nanotec drives via CANopen. NanoJ programming allows you to realize simple master/slave functionalities, such as synchronizing two drives without a PLC.
PD4-E591L42-E-65-3 – Stepper motor with integrated controller IP65 – NEMA 23/24

Availability
Add to cart

PD4-E591L42-E-65-3 was added to your basket.
Accessories
| Z-K4700/50 | Capacitor |
|
|
| ZK-M12-5-2M-1-B-S | Power straight, 2m |
|
|
| ZK-M12-12-2M-1-AFF | IO straight, 2m |
|
|
| ZK-M12-4-2M-1-D-RJ45 | EtherNET/IP straight, 2m |
|
Under „Downloads“ you will find the technical manual that corresponds with the stock firmware. Please refer to the new technical manual (FIR-v2139) when using Plug & Drive Studio 2.
Please click on „Combine Article” or the plus sign to start the configurator.
Technical Data
-
Size 56 mm
-
Fieldbus EtherNet/IP
-
Holding Torque 187 Ncm
-
Rated Current (RMS) 4.2 A
-
Number of Digital Inputs 6
-
Number of Analog Inputs 1
-
Number of Digital Outputs 2
-
Encoder
-
Encoder Resolution 1024 CPR
-
Weight 1.3 kg
-
NEMA 23
-
Interface -
-
Operating Voltage 12 VDC - 48 VDC
-
Peak Current (RMS) 4.2 A
-
Type of Digital Inputs 5/24 V switchable
-
Type of Analog Input 0 - 20 mA / 0 - 10 V switchable
-
Type of Digital Output open-drain (max. 24 V/100 mA)
-
Encoder Type single-turn absolute
-
Length 103 mm
Dimensions
Torque Curves
Recommended load limit:
Maximum short-term static load that may be reached when the service life is taken into account.
Maximum short-term static load that may be reached when the service life is taken into account.
|
Torque
|
Output power
|
Torque [Nm] at 351.00 rpm
|
||
|---|---|---|---|---|
| 4.2A 48V | 1.84 | |||
| 4.2A 24V | 1.4 | |||
|
|
||||
Downloads
Datasheets
Manuals
Conformity
Accessories
| Z-K4700/50 | Capacitor |
|
|
| ZK-M12-5-2M-1-B-S | Power straight, 2m |
|
|
| ZK-M12-12-2M-1-AFF | IO straight, 2m |
|
|
| ZK-M12-4-2M-1-D-RJ45 | EtherNET/IP straight, 2m |
|
Knowledge Base
NanoJ is a programming language that is integrated in the Plug & Drive Studio software.
The examples and the Application Note show you how the NanoJ Library simplifies the use of the CiA 402 Power State Machine. The functions of the library are contained in a single header file, which you can easily add to your NanoJ project in Plug & Drive Studio.
Our application notes show you how to use NanoJ code templates for the individual configuration of Nanotec motor controllers.

Closed-loop field-oriented control is a method of running stepper motors much like a servo motor, i.e. smoothly, with low resonance and position-controlled.
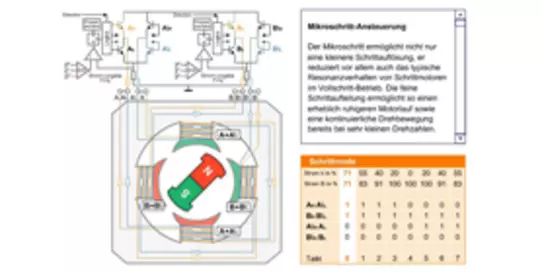
This interactive, animated demonstration shows how stepper motors work. It starts when you move the "continuous" slider to the left or right. Alternatively, you can also view individual images by clicking the arrows.
This application note shows you how to connect a Nanotec controller/drive with Ethernet using a DHCP tool.

EtherNet/IP (EtherNet Industrial Protocol) is a real-time Ethernet protocol that is used widely in automation technology. It was developed as an open standard by Allen-Bradley and is now managed by the Open DeviceNet Vendor Association (ODVA).