
Metodi di controllo per motori brushless DC e passo-passo
I controller Nanotec e i motori con controller integrato possono essere controllati con quattro metodi diversi. La selezione avviene tramite interruttore DIP, file di configurazione o software. Le varianti di controllo supportate sono riportate nelle rispettive schede tecniche.
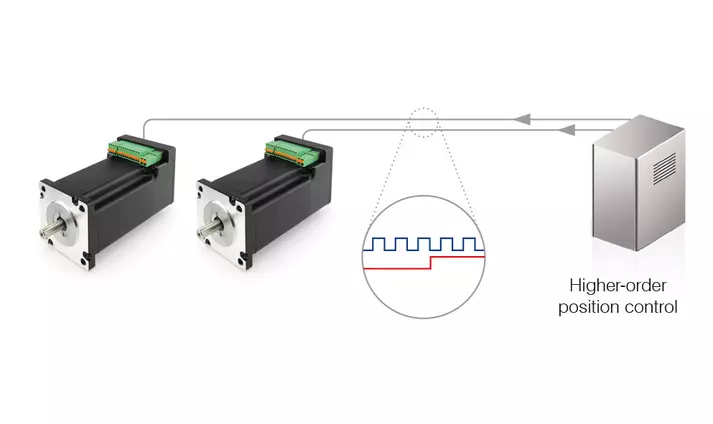
Clock & direction
In modalità impulso-direzione, il motore viene azionato tramite ingressi digitali da un controller di posizionamento di livello superiore con un segnale di clock e un segnale di direzione. A ogni ciclo, il motore esegue un passo nella direzione corrispondente al segnale di direzione;
Il controllo basato su software dei controller consente una relazione flessibile tra segnale di clock e posizione. Non è necessario utilizzare un microstep per ottenere una commutazione sinusoidale del motore, poiché i segnali di ingresso sono sempre interpolati in background. Ciò significa che il funzionamento fluido del micropasso può essere utilizzato anche con i vecchi sistemi di controllo di livello superiore che emettono solo passi interi o mezzi passi;
Inoltre, il numero di passi per giro può essere specificato come numero razionale (numeratore/denominatore). Il disaccoppiamento dall'Angolo di passo effettivo o dal numero di poli del motore consente inoltre di cambiare facilmente il tipo di motore in un'applicazione esistente e, ad esempio, di sostituire un motore passo-passo trifase con un motore brushless DC senza dover modificare il numero di cicli.
Oltre alla classica modalità impulso-direzione, è disponibile anche una modalità orologio/antiorario (CW/CCW), in cui l'ingresso utilizzato determina la direzione.
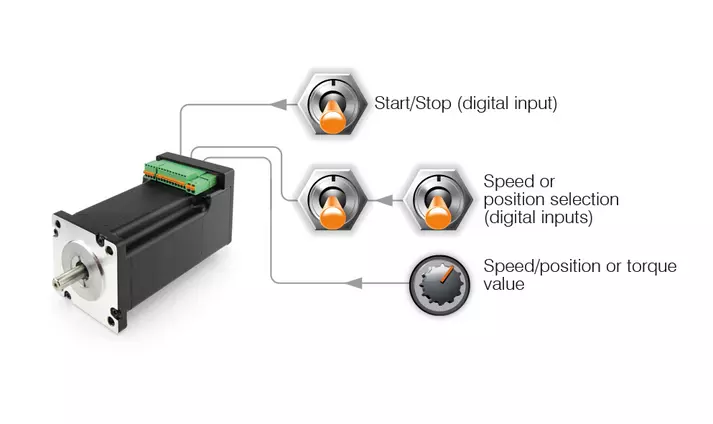
Specifica del setpoint tramite ingressi analogici e digitali
Gli ingressi digitali e analogici dei controller Nanotec possono essere letti ogni millisecondo ed elaborati in un programma di sequenza interno. In questo modo, la velocità, la posizione o la coppia, ad esempio, possono essere controllate tramite un ingresso analogico. Gli ingressi digitali possono essere utilizzati anche per avviare un movimento o per selezionare diverse velocità, ad esempio.
Gli ingressi sono assegnati a un programma di sequenza interno.
Gli ingressi vengono assegnati alle funzioni tramite un programma nel linguaggio di programmazione NanoJ V2, che può essere creato in Plug & Drive Studio.
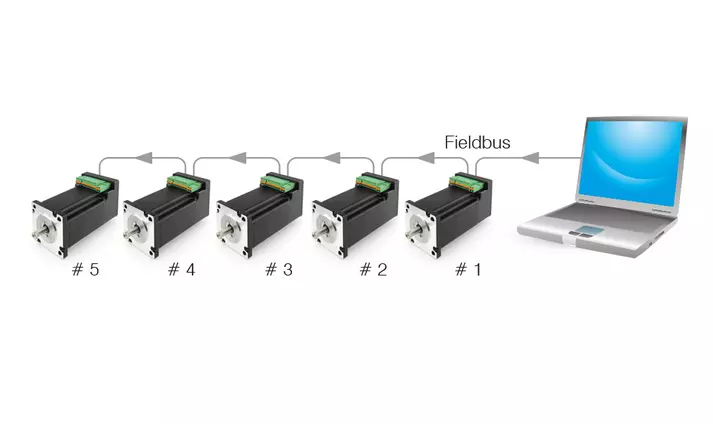
Fieldbus
È possibile far funzionare i controller e i motori Nanotec con controller integrato con un gran numero di controller master diversi (PLC) tramite fieldbus. In questo caso, i controller agiscono come slave che implementano i comandi del controller di livello superiore. Nanotec offre le seguenti opzioni fieldbus:

Controllo di sequenza per funzionamento autonomo o intelligenza distribuita
L'ambiente di programmazione integrato in Plug & Drive Studio può essere utilizzato per creare programmi nel linguaggio di programmazione basato su C++ NanoJ V2. Questi programmi vengono eseguiti autonomamente direttamente sul controller o sul motore con controller integrato e possono essere memorizzati nel controller tramite fieldbus/USB.
Oltre alle applicazioni semplici per il controllo tramite ingressi digitali/analogici per il funzionamento autonomo, è possibile implementare anche applicazioni complesse controllate tramite fieldbus. Un'intelligenza distribuita di questo tipo consente di mantenere basso l'utilizzo del bus in un'applicazione fieldbus con un gran numero di partecipanti. Inoltre, le funzioni critiche in termini di tempo possono essere eseguite direttamente dal fieldbus senza ritardi.
- Accesso a tutti i parametri di controllo nonché agli ingressi e alle uscite in cicli di millisecondi
- Variabili, rami, loop nonché funzioni logiche e matematiche
