
Nanotec Electronic GmbH & Co KG Co KG sostiene da molti anni progetti scientifici presso università, istituti superiori e accademie professionali mettendo a disposizione prodotti e conoscenze specialistiche. Per essere finanziato, un progetto deve essere innovativo dal punto di vista tematico, basarsi su metodi di ricerca scientifica e avere un potenziale impatto positivo sulla società.
Nanotec sostiene Deutschlandstipendium
Deutschlandstipendium è un'iniziativa nata nel 2011 che offre borse di studio mensili di 300 euro a studenti e studentesse, anche del primo anno, con eccellenti prospettive accademiche e professionali. Grazie a una collaborazione tra settore pubblico e privato, aziende, fondazioni e individui privati possono supportare giovani talenti con una donazione di 150 euro al mese. Il governo federale tedesco raddoppia il contributo, aggiungendo altri 150 euro al mese. Per di più, molte università e sponsor privati affiancano i borsisti con programmi di mentoring, eventi di networking e opportunità di tirocinio.
Siamo fermamente convinti che l'innovazione nasca dal talento e dalla ricerca e per questo investiamo nelle nuove generazioni di talenti universitari. I ricercatori e gli innovatori di oggi sono il motore dell'economia di domani. Per questo, Nanotec Electronic è uno degli sponsor di Deutschlandstipendium.
Foto: Astrid Eckert, TU Munich

Progetti finanziati

Analisi intelligente del suolo con ANELISE
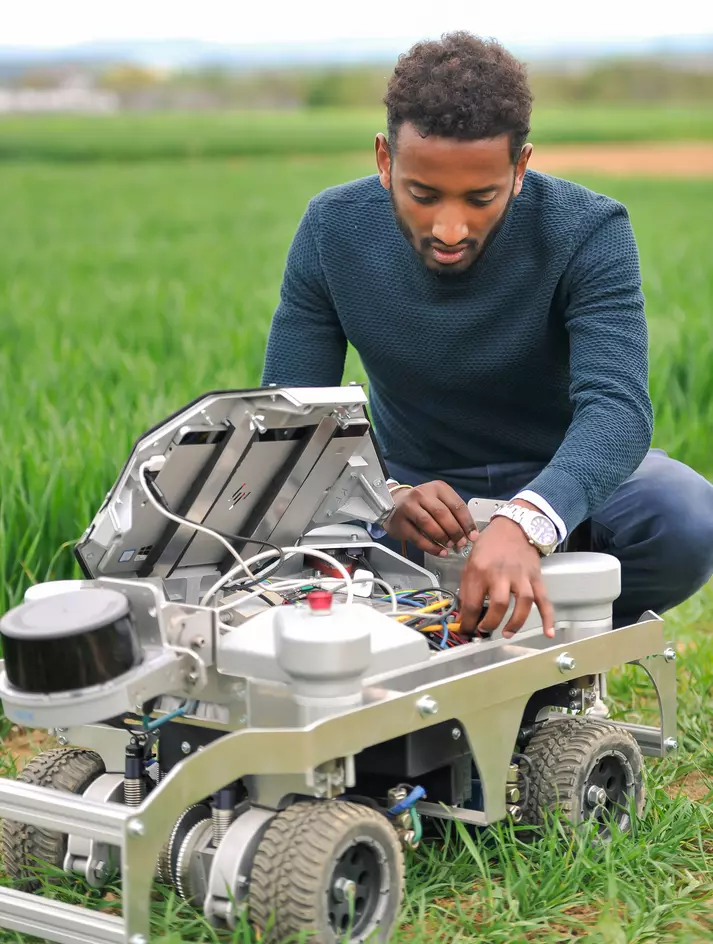
Automatizzare in modo intelligente l'analisi dei campioni di terreno: questo è l'obiettivo del progetto ELISE dell'Università Tecnica dell'Alta Baviera OTH di Regensburg. Gli studenti si concentrano in particolare sull'ottimizzazione del prelievo dei campioni, poiché i metodi tradizionali, spesso troppo invasivi, tendono a contaminarli, compromettendo l'affidabilità delle analisi.
Grazie a un robot autonomo, il materiale verrà ora prelevato in modo più delicato. ANELISE estrae i campioni in punti predefiniti, sempre alla stessa profondità e senza il rischio di contaminazioni da microrganismi morti o materiali estranei.
Nanotec sostiene la realizzazione del progetto con il motore BLDC DB59 in combinazione con il riduttore epicicloidale di precisione GPLE40 e il controller CL4. Questo azionamento garantisce un prelievo dei campioni preciso, con un minimo dispendio di forza, offrendo all'utente il controllo di tutti i dati in tempo reale.
(Fonte e foto: Michael Fellner)

Upgrade per il campo da tennis
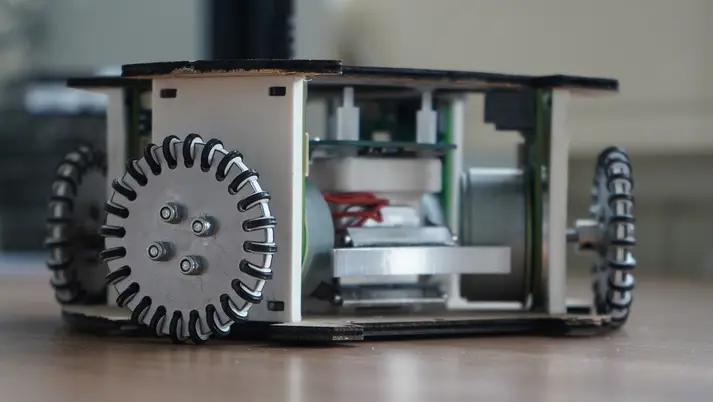
Gli studenti dell'Istituto Tecnico Superiore austriaco HTL Rennweg hanno progettato un robot autonomo in grado di trascinare una rete livellatrice sulla superficie di gioco. Premendo un pulsante, il cosiddetto Court Bot si muove in autonomia sul campo, distribuisce la sabbia in modo uniforme e corregge eventuali irregolarità del terreno.
Il robot è dotato di ruote a rotazione zero (zero-turn) che gli consentono di coprire l'intera area. Riesce anche a sollevare la rete e ruotarla di 90 gradi. Questo riduce al minimo l'ingombro di lavoro, permettendogli di muoversi agilmente tra gli ostacoli e di raggiungere ogni angolo con precisione.
Per la realizzazione del progetto, Nanotec fornisce agli studenti svariati componenti, tra cui i motori passo-passo SCA5618, i motori BLDC PD6 con controller integrato e i riduttori epicicloidali di precisione GPLE60.
(Fonte e foto: Alexander Heim)
Quando l'alta tecnologia incontra il calcio
Gli studenti della Robotics Student Association di Delft (Paesi Bassi) partecipano alla RoboCup con il nome Delft Mercurians, competendo a livello internazionale nella Small-Sized League.
In questa competizione, due squadre di sei robot autonomi si sfidano in una partita di calcio in miniatura. Oltre a muoversi con precisione e ad alta velocità, i robot devono rispettare restrizioni fisiche e regole simili a quelle del calcio reale.
Per affrontare queste sfide, Nanotec mette a disposizione degli studenti dell'Università Tecnica di Delft diversi motori piatti a rotore esterno DF45 e encoder NME2 ad alta risoluzione cche garantiscono maggiore coppia, velocità e un'elevata precisione nella localizzazione e nel controllo della posizione.
(Fonte e foto: Zhengyang Lu)

Biliardino controllato dall'intelligenza artificiale
Questo innovativo progetto della TU Darmstadt ridefinisce i confini tra uomo e macchina. Il biliardino controllato dall’intelligenza artificiale è stato sviluppato nell'ambito di un progetto di ricerca dedicato alla creazione di algoritmi avanzati per controller robotici basati sull'intelligenza artificiale. Gli omini del biliardino sono mossi dai controller ad alte prestazioni C5-E e dai motori brushless DC DB59 di Nanotec, permettendo agli utenti di sfidare l'intelligenza artificiale.
(Fonte e foto: Janosch Moos)

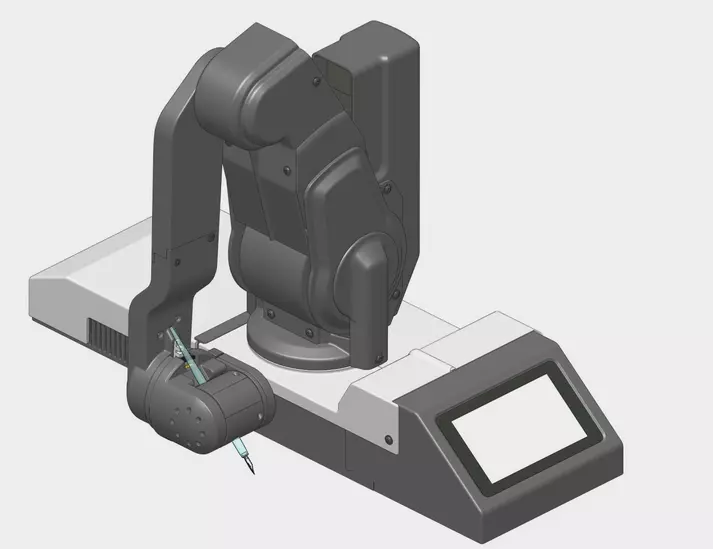
Robot articolato a sei assi
Nell'ambito della laurea specialistica in Meccatronica e Robotica, uno studente dell'Università Tecnica di Monaco di Baviera (TU München) ha sviluppato un robot articolato a sei assi. Grazie al suo design a braccio snodato, il sistema è particolarmente adatto per compiti di posizionamento dinamico.
Leggero e azionato a cinghia, il robot è dotato di due motori a rotore esternoDFA68 e quattro motori a rotore esternoDF45, controllati tramite CL4-E e gestiti attraverso l'interfaccia CANopen.
I componenti sono stati forniti da Nanotec come parte del finanziamento di progetto.
(Fonte e foto: Adrian Prinz)
Impianto PVD con azionamento ottimizzato del tavolo
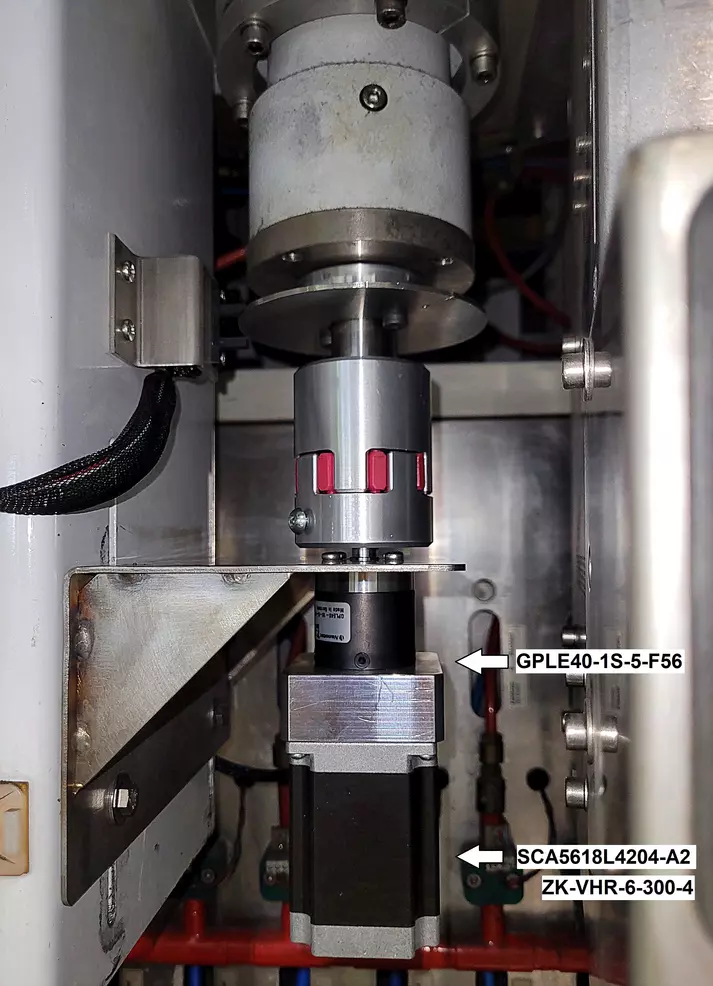
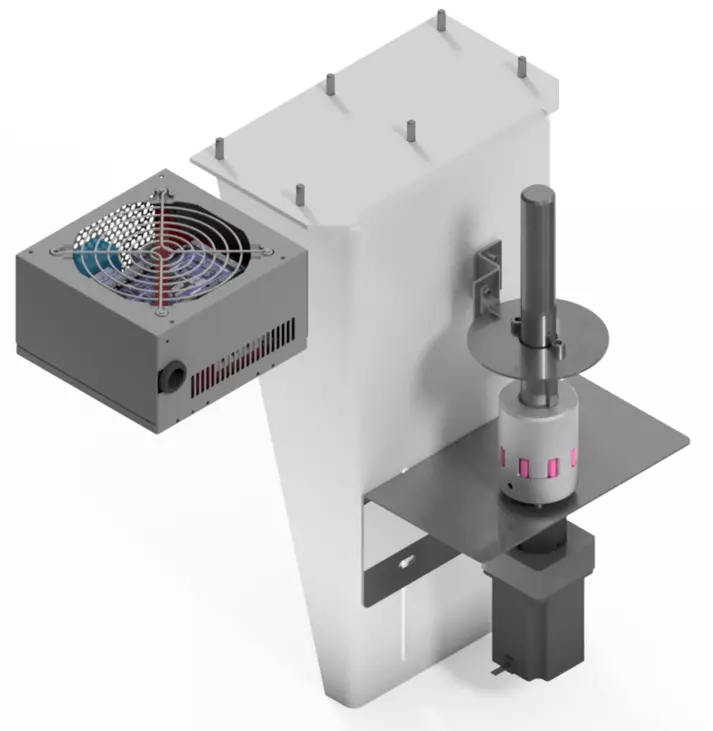
Nell'ambito di un progetto di laurea specialistica, gli studenti dell'Università di Scienze Applicate del Niederrhein (Hochschule Niederrhein, Germania) hanno riprogettato il sistema di movimentazione del tavolo di un impianto PVD (Physical Vapour Deposition). La sfida era garantire che il tavolo rotante dell'impianto di rivestimento PVD non solo permettesse una regolazione precisa della velocità di rotazione, ma consentisse anche il prelievo dei componenti in posizioni predefinite.
Per raggiungere questo risultato, i futuri ingegneri meccatronici hanno sviluppato autonomamente il software e il sistema di controllo, mentre Nanotec ha fornito i componenti meccanici necessari. Grazie all'integrazione del motore passo-passo SCA5618 e del riduttore epicicloidale GPLE40, l'impianto è stato messo in funzione con successo.
(Fonte e foto: Nikolai Desch)


Dritti al podio con KA-RaceIng
Con "KA-RaceIng", il Karlsruhe Institute of Technology si conferma uno dei protagonisti della Formula Student. Con il loro nuovo prototipo autonomo KIT23, gli studenti mirano a proseguire la loro scia di successi e a consolidare la loro posizione ai vertici della competizione.
Il motore brushless DC piatto DFA90 e il controller ad alte prestazioni C5-E-2 svolgono un ruolo centrale. Questi prodotti messi a disposizione da Nanotec, in combinazione con il cambio sviluppato da KA-RaceIng, garantiscono una sterzata precisa e veloce che soddisfa i requisiti della Formula Student. Le aspettative del team sono alte: con il KIT23, gli studenti vogliono salire sul podio dei vincitori non solo in questa stagione, ma anche nelle prossime!
(Fonte e foto: Simon Enderle)

Con Os.cart il trasporto della batteria diventa facile
La batteria dell'auto da corsa dall'Os.car Racing Team dell'Istituto Universitario di scienze applicate di Vienna (FH Campus Wien) pesa fino a 100 kg e deve essere sollevata regolarmente dal veicolo per essere trasportata alla stazione di ricarica. Da oggi, questa operazione diventa più semplice grazie a Os.cart, il carrello di trasporto ufficiale, sviluppato nell'ambito di un progetto di maturità sviluppato all'Istituto Tecnico Superiore austriaco HTL Rennweg.
Ecco come funziona: grazie a un meccanismo a forbice azionato da un sistema a vite conduttrice e regolabile in altezza in continuo, Os.cart si solleva fino all'altezza dell'abitacolo della vettura. In questo modo la batteria può essere installata e rimossa comodamente, in modo ergonomico e con il minimo sforzo.
Per la realizzazione di Os.cart, sono stati utilizzati diversi componenti forniti da Nanotec, tra cui il motore passo-passo ST6018, l'encoder WEDL e i riduttori epicicloidali GP56 e il controller C5-E.
(Fonte e foto: Kerstin Preisl)
Octa-Mix: il mix perfetto
Il nuovo Octa-Mix rivoluziona la preparazione automatizzata delle bevande Progettato dagli studenti dell'Istituto Tecnico Superiore austriaco HTL Rennweg, questo sistema innovativo miscela diversi ingredienti liquidi secondo le impostazioni desiderate, preparando il mix perfetto in pochi istanti.
Il rapporto di miscelazione si imposta comodamente tramite display touch o app Android. Con i suoi otto serbatoi, Octa-Mix è in grado di erogare acqua, sciroppi e concentrati, permettendo di realizzare anche combinazioni più complesse. Il dosaggio preciso è affidata a un sistema di pompe peristaltiche, controllate da nove motori passo-passo ST4118, forniti da Nanotec nell’ambito del suo programma di supporto ai progetti accademici.
(Fonte e foto: Fabian Gutruf)


Raceyard diventa a guida autonoma
Il team Raceyard della Fachhochschule Kiel è un protagonista fisso della Formula Student Germany (FSG), il prestigioso concorso internazionale di ingegneria per auto da corsa. L'obiettivo del progetto è stato lo sviluppo del T-Kiel A 22 E, trasformandolo da monoposto tradizionale a veicolo a guida autonoma.
Il principale ostacolo tecnico del progetto è stata la conversione del sistema di sterzata manuale in un sistema autonomo. Per affrontare questa sfida Nanotec ha fornito i componenti necessari: il motore BLDC ad alte prestazioni DB43 completo di riduttore epicicloidale GPLE40, encoder NTO3 e controller C5-E.
(Fonte e foto: Bo Kluth)

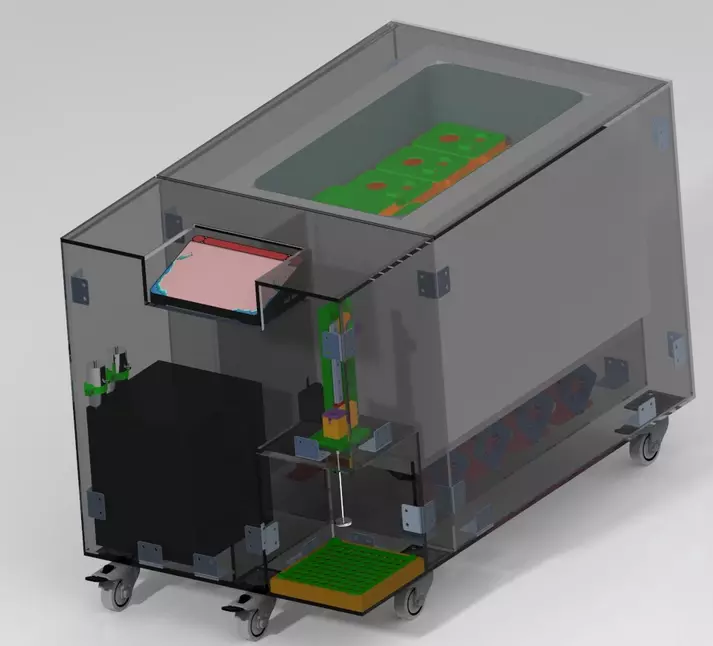
RoundT: il tavolo trasparente che serve da bere
Il RoundT è un innovativo tavolo rotondo dotato di un sistema di spillatura automatizzata, sviluppato da quattro studenti dell'Istituto Tecnico Superiore austriaco HTL Rennweg.
Al suo interno troviamo una camera di raffreddamento che ospita sei serbatoi per bevande da quattro litri ciascuno. La camera è in grado di portare le bevande a 14 °C in soli 20 minuti.
Il cuore del sistema è un meccanismo meccanismo composto da motore, ingranaggio e vite conduttrice che solleva e abbassa la parte centrale del tavolo tramite app. Per questa funzione, Nanotec ha fornito il motore passo-passo ST5918L2008-B, che aziona una ruota dentata collegata a una vite conduttrice mettendo in movimento tutta la parte interna. Per erogare una bevanda, basta posizionare un bicchiere su uno degli otto rubinetti (di produzione propria) e selezionare la bevanda desiderata tramite app. Il flusso della bevanda, visibile attraverso il piano trasparente del tavolo, mostra come la bevanda fresca viene versata nella tazza dal basso attraverso il sistema di tubi flessibili.
(Fonte e foto: Dominik Michalski / Niklas Eichelberger)

Solar Boot
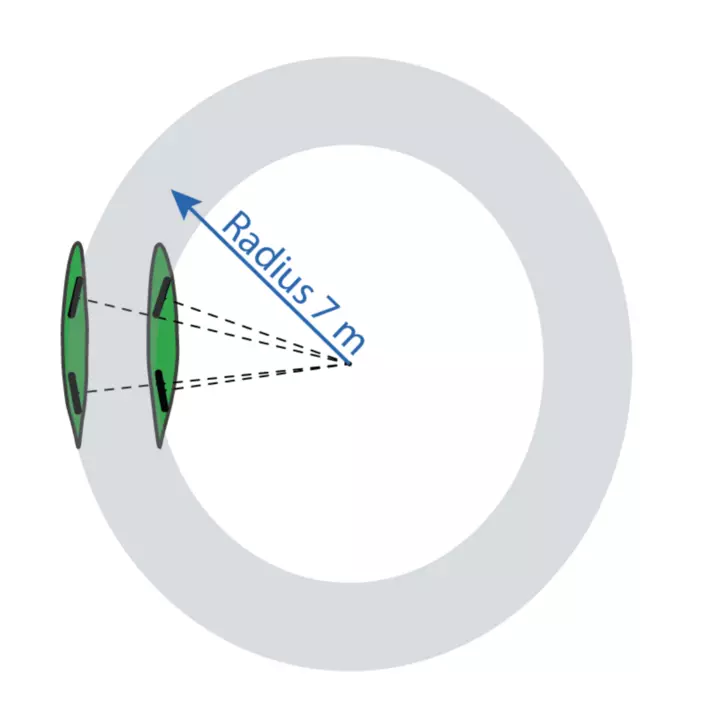
Il Solar Boot è un progetto universitario sviluppato da un team di studenti di ingegneria dell'Instituto Superior Técnico di Lisbona, in Portogallo.
Nella stagione corrente, il team sta costruendo la seconda imbarcazione, la SR02, che avrà una lunghezza di 6 metri e una larghezza di 2 metri. Questo nuovo modello sarà più leggero, più veloce e più efficiente. Per raggiungere questi obiettivi, la squadra sta lavorando a un sistema a foil, che solleverà lo scafo dall'acqua per ridurre la resistenza aerodinamica. A tal fine gli studenti stanno costruendo un sistema di controllo elettronico dell'angolo di incidenza delle idroali. Gli attuatori di Nanotec, in combinazione con sensori di precisione, permettono un controllo automatico del movimento dei foil.
Per determinare l'esatta posizione delle idroali, il gruppo di progetto si affida a tre motori passo-passo, tutti controllati da controller N5-1-2 e dotati di encoder NOE2. Grazie alle schede tecniche dettagliate e al software Plug & Drive Studio, gli studenti possono testare diverse modalità operative e impostare facilmente tutti i parametri desiderati.
(Fonte e foto: Sebastião Beirão)
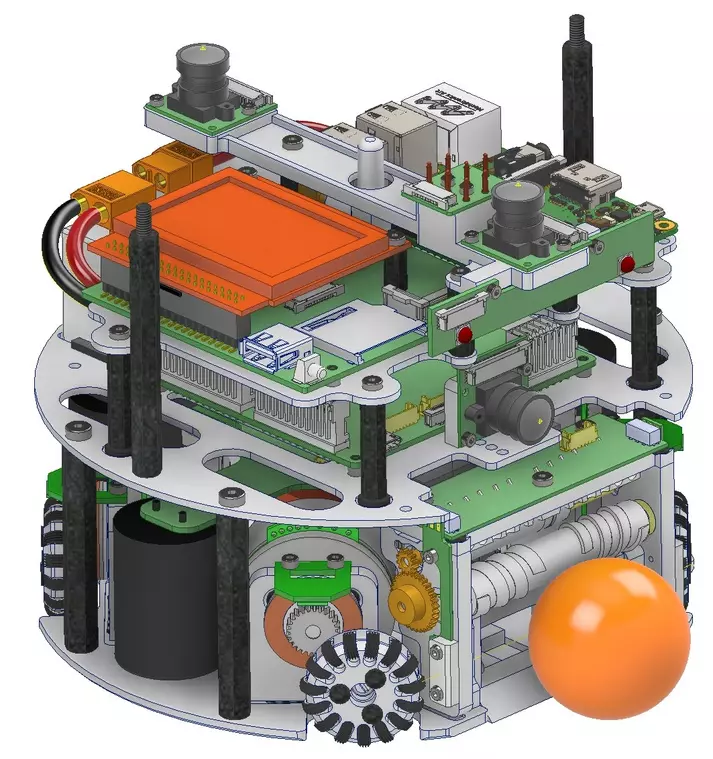
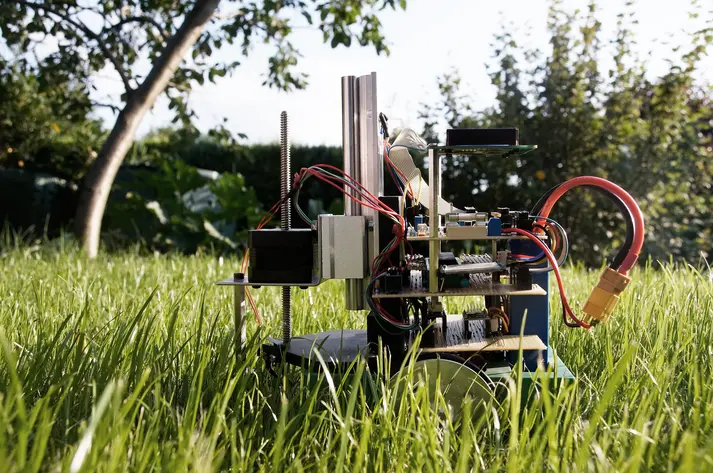
Goliath: il robot agricolo autonomo
Presso l’Università di Hohenheim è in corso una ricerca innovativa sul futuro dei robot autonomi per l'agricoltura. Un team di studenti partecipa regolarmente al Field Robot Event, una competizione annuale internazionale che mira a utilizzare piccoli robot per eseguire autonomamente lavorazioni agricole tradizionalmente considerate dispendiose di tempo e poco redditizie.
Grazie al supporto di Nanotec, il team ha progettato e costruito Goliath, un robot all'avanguardia pensato per muoversi con precisione tra le file di piante. Il suo utilizzo spazia dal monitoraggio autonomo a piccoli interventi agricoli sul campo. Per questo ogni anno vengono progettati e integrati nel robot ulteriori attuatori.
Goliath è dotato di un sistema di sterzata e trazione su singola ruota che integra i motori PD4-C5918M4204 e PD6-N8918S6404. Il robot è controllato tramite il protocollo CANopen, gestito attraverso un tablet e il middleware ROS (Robot Operating System). Per rilevare l'ambiente circostante, Goliath utilizza un sistema basato su scanner laser e telecamere.
(Fonte e foto: Jonas Esterl / Dr. sc. agr. Dipl.-Ing. David Reiser)
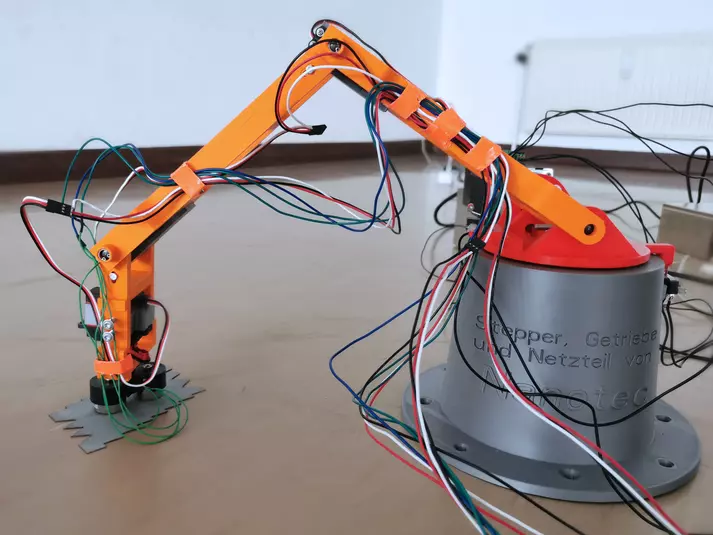
Robot a braccio articolato Pick'n'Place
Un team di studenti dell'Istituto Tecnico Superiore austriaco HTL Rennweg ha costruito un robot pick & place a cinque assi rotanti in grado di raccogliere degli oggetti e di riposizionarli con precisione in un altri punti.
Per garantire un movimento fluido e preciso, il team ha utilizzato due servomotori brushless DC con controller integrato PD4-C6018L4204-E-01 e il riduttore epicicloidale a coppia elevataGP56-S1-3-SR di Nanotec, applicati ai due assi principali.
Il robot a braccio articolato è stato progettato per offrire flessibilità e versatilità. È dotato di elettromagneti, che fungono da pinze per afferrare oggetti che non possono essere raccolti magneticamente. Il team ha installato servomotori compatti e leggeri sugli altri tre assi, permettendo di fissare direttamente i motori sui rispettivi assi.
(Fonte e foto: Silas Amesmann)
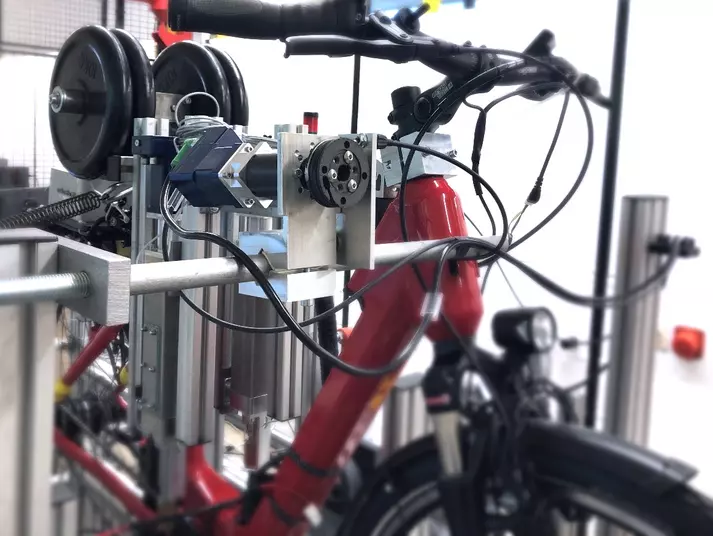
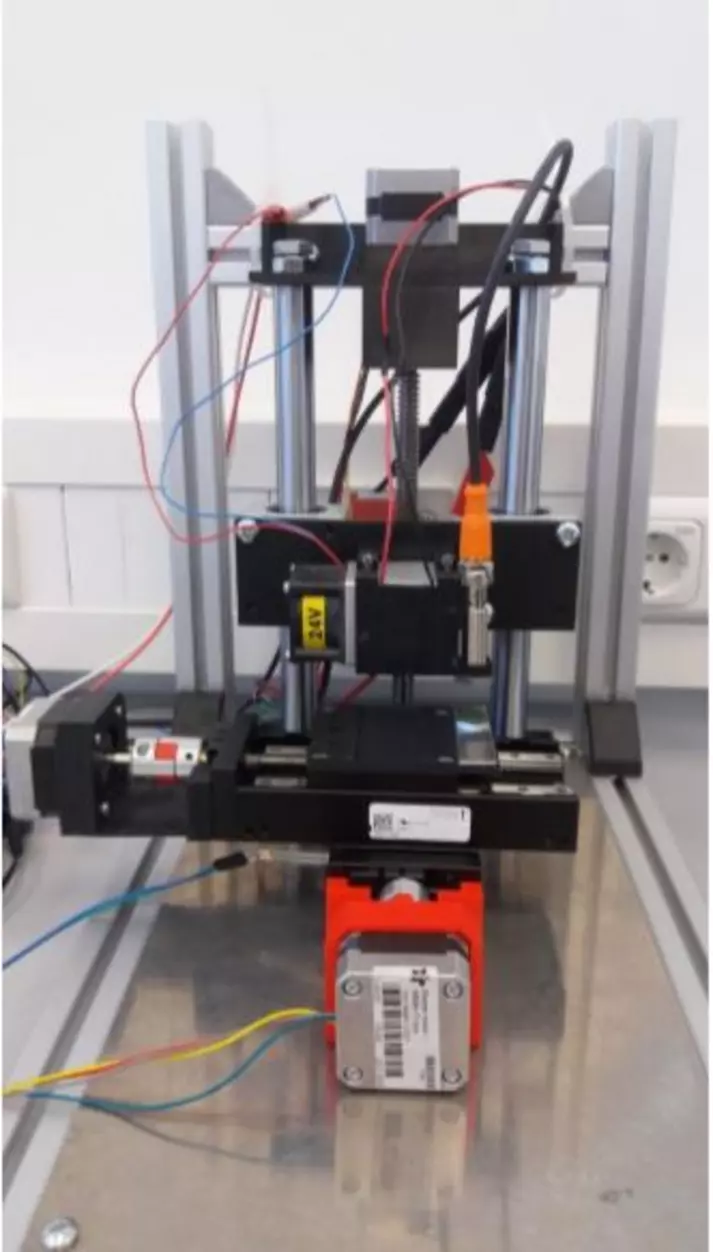
Banco di prova per biciclette elettriche
Le biciclette elettriche non sono più un prodotto di nicchia riservato a una ristretta fascia di utenti: la crescente domanda di E-Bike di alta qualità ha spinto l'Università Tecnica di Aalen (Hochschule Aalen) a sviluppare un banco di prova avanzato per testarne le prestazioni e la qualità come sistema completo. Finora, la maggior parte i test sulle E-Bike si sono concentrati principalmente su singoli componenti, offrendo una simulazione solo parziale delle condizioni reali.
L'elemento distintivo di questo banco di prova sta proprio nella capacità di riprodurre fedelmente il comportamento della pedalata umana. Grazie a un sofisticato sistema di regolazione sinusoidale della coppia motrice, il banco di prova imita il passo oscillante tipico della pedalata umana, offrendo test estremamente realistici.
Anche il comportamento del cambio marcia viene simulato con precisione: un motore passo-passo Nanotec PD2-N4118L1804-IP-2 (NEMA 17) è accoppiato a una puleggia che avvolge il cavo del cambio. Attraverso la variazione dell'angolo della puleggia, il sistema regola la tensione del cavo in base al rapporto selezionato. La lunghezza del cavo associato al rispettivo ingranaggio viene impostata modificando l'angolo dell'albero di uscita.
Il motore passo-passo è stato configurato dal team della Facoltà di Ingegneria Meccanica e Tecnologia dei Materiali utilizzando il software proprietario di Nanotec, NanoPro e viene controllato direttamente da PC.
(Fonte e foto: Özben Sarikurt)
Stazione di terra per il tracciamento satellitare
Space Technology e.V. della TU Darmstadt è un'associazione universitaria accreditata che promuove la ricerca spaziale degli studenti. Fin dalla sua fondazione, il team composto da 35 studenti si è dedicato allo sviluppo di un cosiddetto CubeSat, ossia un piccolo satellite sperimentale.
L'obiettivo della missione satellitare è testare nuove tecnologie che aiutino a ridurre i rischi derivati dai detriti spaziali. Per poter comunicare con CubeSat, il team ha progettato e realizzato una stazione di terra in grado di mantenere un collegamento radio stabile allineando con precisione un'antenna. Il sistema di tracciamento dell'antenna è basato su un meccanismo a due assi, alimentato da un motore passo-passo AS5918L4204-EB di Nanotec con grado di protezione IP65. Per ottenere le coppie necessarie con una precisione angolare elevata, il team ha integrato riduttori epicicloidali di precisione GPLE60-2S-32 di Nanotec.
(Fonte e foto: Fabian Burger)

Controllo automatizzato delle luci aeroportuali
Il progetto reLight è un innovativo dispositivo di misurazione delle luci aeroportuali sviluppato da quattro studenti dell'Istituto Tecnico Superiore HTL Rennweg di Vienna. Le luci installate sulle piste di rullaggio degli aeroporti devono essere sottoposte a controlli periodici per garantire il rispetto delle normative e mantenere gli elevati standard di sicurezza richiesti. Per effettuare una verifica accurata, l'intensità luminosa viene misurata da diverse angolazioni. Tuttavia, alcune luci possono non essere perfettamente allineate all'interno della loro sede, rendendo necessaria una compensazione meccanica del disallineamento. A questo scopo, il sistema impiega un attuatore lineare "non-captive" LA421S14-A-UKBN di Nanotec, che esegue la regolazione in modo preciso e completamente automatizzato.
Il dispositivo di misurazione sviluppato dal team ha trovato impiego in piccoli aeroporti austriaci in quanto valida alternativa ai modelli disponibili sul mercato.
(Fonte e foto: Matthias Gerber)

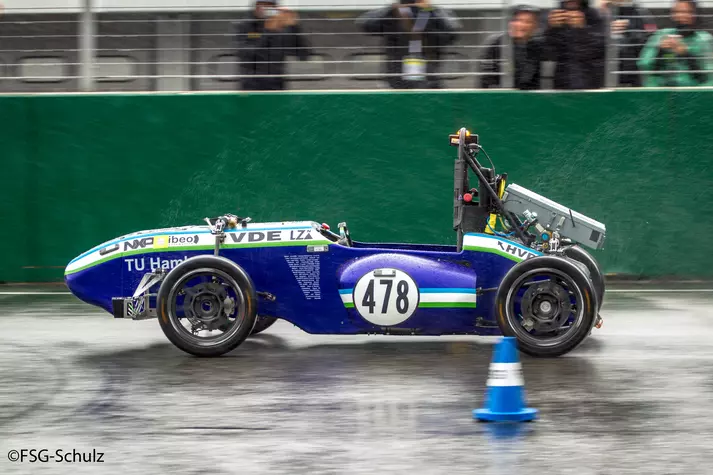
Sistema di sterzata autonoma per auto da corsa
Dal 2011, il team e-gnition Hamburg dell’Università di Tecnologia di Amburgo (TUHH) progetta e costruisce monoposto elettriche, partecipando regolarmente alla Formula Student, la più grande competizione di ingegneria al mondo, con grande successo. Il team, composto da circa 60 studenti, si è distinto per le sue innovazioni tecnologiche nel settore delle competizioni automobilistiche. Nella stagione 2020, il team ha gareggiato per la prima volta con un concetto combinato, utilizzando lo stesso veicolo sia nelle competizioni elettriche che in quelle a guida autonoma.
Per il sistema di sterzata autonoma, il team ha utilizzato diversi motori e controller, che, grazie alla tecnologia Nanotec, permettono di mantenere il veicolo perfettamente in traiettoria. Nella stagione 2021, gli studenti hanno utilizzato il controller CL4-E-2-12 per controllare il motore elettrico integrato nel volante, che aziona lo sterzo replicando i movimenti di un pilota.
Per ulteriori dettagli tecnici e immagini, visitail sito: https://en.egnition.hamburg/
(Fonte e foto: Ole Ramming)

Il rover ELECTRA
Il team STAR Dresden e.V. è un gruppo di ricerca aerospaziale dell'Università Tecnica di Dresda (TU Dresden). Composto da circa 30 membri provenienti da diversi indirizzi di studio, tra cui ingegneria, fisica e medicina, il team ha sviluppato un rover e ha partecipato con successo all'European Rover Challenge (ERC) in Polonia, una competizione internazionale in cui studenti da tutto il mondo mettono si sfidano tra loro con questi rover autocostruiti e svariati compiti.
Il rover del team STAR Dresden e.V. si chiama ELECTRA (Expeditionary Lightweight Extraction Collection Transportation Rover Assistant) ed è stato progettato per simulare una missione su Marte e assistere gli astronauti su una superficie che riproduce il suolo marziano. Durante la competizione, il team si trovava in una tenda separata e ha telecomandato il rover da remoto, dovendo affrontare alcune prove complesse, tra cui riuscire a raccogliere campioni di terreno, scattare fotografie, premere interruttori su un pannello di controllo o collegare una presa di corrente – il tutto nel minor spazio possibile e con un elevato livello di autonomia. Inoltre, poteva orientarsi solo con l'aiuto di codici QR e doveva seguire un percorso predefinito su un terreno difficile.
Il rover è dotato di quattro ruote per la mobilità, ciascuna delle quali può ruotare quasi di 360° attorno al proprio asse verticale. Per il sistema di sterzata, il team ha integrato il motore brushless DC DF45L024048-C2 di Nanotec, abbinato a un riduttore epicicloidale leggero GPLK42-56. Per l'azionamento il team ha optato per il motore brushless DC DF45L024048-A2 combinato con un riduttore epicicloidale a coppia elevata GP42-S2-46-SR.
(Fonte e immagine: Elias Ortlieb)

Il rimorchio elettrico E-Trailer
Il team di progetto "E-Trailer" dell'istituto tecnico Rudolf Diesel di Norimberga ha progettato, disegnato e costruito un rimorchio elettrico autonomo. Per consentirgli di muoversi autonomamente, è stato dotato di un sistema di trazione elettrica indipendente, montato sull'asse posteriore. La sterzata è affidata alla ruota anteriore, che viene controllata da un motore dedicato. Grazie a questa configurazione, il rimorchio è in grado di sterzare, frenare e mantenere la distanza di sicurezza in modo autonomo.
Per il controllo della sterzata dell'asse anteriore, il team composto da quattro persone aveva bisogno di un motore passo-passo a corrente continua (24 - 48 V) e hanno scelto il motore brushless DC con controller integrato PD4-C5918M4204-E-01 e il riduttore epicicloidale a coppia elevata GP56-S1-7-SR di Nanotec.
(Fonte e immagine: Sebastian Blank, Maximilian Lenk, Andreas Ortner e Philipp Geitner)

Distributore automatizzato per spezie
Nell'ambito del progetto SIA (Schüler-Ingenieur-Akademie), un gruppo di studenti del liceo di Rosenstein ha ideato, progettato e realizzato un dispenser automatizzato per spezie. Il sistema, controllato tramite microcontrollore Arduino, è in grado di selezionare e distribuire automaticamente i contenitori dalle apposite celle, rendendo il processo di erogazione completamente automatizzato.
Grazie all'impiego di motori passo-passo di Nanotec ((1x ST8918L4508-B, ST5918S1008-A e ST4118L1206-A), gli studenti sono riusciti a realizzare in modo ottimale il concetto di movimento del distributore per spezie.
Fonte e foto: Jens Gruberer

Sistema di sterzata autonoma
Il Global Formula Racing Team è un gruppo internazionale composto da studenti del programma di doppia laurea della Hochschule Baden-Württemberg di Ravensburg (Germania) e della Oregon State University (USA). Il team ha sviluppato due auto da corsa e ha partecipato alle competizioni internazionali della Formula Student, sfidando più di 500 università in tutto il mondo.
Alla Formula Student Germany tenutasi all'Hockenheimring e alla Formula Student Spain svoltasi al Circuit de Barcelona in Catalogna, il team della DHBW di Ravensburg ha ottenuto buoni risultati nonostante il design ancora in erba.
Una delle sfide più complesse affrontate nella progettazione dell'auto è stata la realizzazione del sistema di sterzata, che doveva soddisfare gli elevati standard richiesti per l'utilizzo su pista. Questo doveva soddisfare i requisiti per l'uso in pista. In questo caso, il team ha potuto contare sul supporto di Nanotec Electronic, che ha fornito il motore di sterzata composto da due PD6-CB87S048030-E-098. Grazie a questo motore a corrente continua il veicolo è in grado di replicare autonomamente il comportamento di sterzata di un pilota umano.
Fonte e foto: Marko Bausch
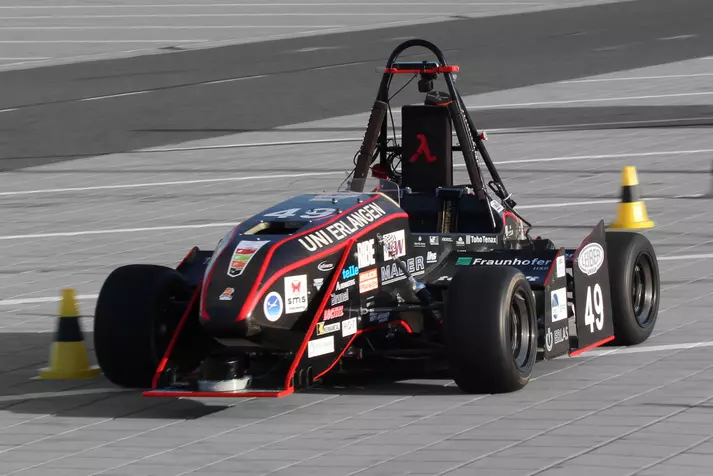
Sterzo automatizzato
Il Driverless Team di High-Octane Motorsports e.V. dell'Università di Erlangen-Norimberga ha trasformato in un anno un kart convenzionale in un'auto a guida autonoma. Per realizzare questa innovazione, il team ha integrato sensori avanzati, un'unità di calcolo e attuatori elettrici per migliorare il controllo del veicolo. Per il sistema di frenata il team ha utilizzato motori passo-passo Nanotec, scegliendo il modello ST4118D1804-B, in grado di garantire una gestione precisa e reattiva del freno. Per altri componenti importanti come lo sterzo, che sono soggetti a requisiti elevati in termini di agilità, potenza e affidabilità, il team ha utilizzato il motore passo-passo ST6018L3008-A con riduttore GPLE60-1S-8. Questa configurazione ha consentito di sviluppare un sistema di sterzata ad alte prestazioni, compatto e perfettamente ottimizzato per il veicolo autonomo.
Fonte e foto: Richard Stierstorfer
Robot che gioca a calcio
All'università duale (DHBW) di Mannheim, il team TIGERS sviluppa piccoli robot che giocano a calcio e che ogni anno partecipano ai campionati mondiali della RoboCup Federation World Cup.
I robot sono costruiti da zero e sono in grado di giocare in modo totalmente autonomo, senza alcun intervento umano. All'ultima edizione della RoboCup, i TIGERS di Mannheim sono stati premiati con l'Excellence Award per gli eccezionali contributi scientifici e le prestazioni complessive.
Nella quarta generazione del robot, il motore è stato sostituito con una versione più potente: il modello DF45L024048-A2 da 65 watt. Questa soluzione si è rivelata ideale, poiché lo spazio disponibile all'interno del robot è estremamente ridotto. La scheda di connessione più compatta della variante A2 ha fatto la differenza.
Fonte e foto: Andre Ryll
Sistema di posizionamento di precisione a 3 assi
Uno studente iscritto all'Istituto Universitario di scienze applicate FH Südwestfalen di Iserlohn ha sviluppato un microdispenser dotato di un sistema di posizionamento di precisione su 3 assi. Questo innovativo dispositivo utilizza un nuovo metodo di dosaggio dei liquidi, in grado di erogare quantità estremamente ridotte con massima precisione.
A differenza dei sistemi tradizionali, il micro-dosatore non dipende dalla viscosità del liquido poiché il dosaggio non avviene tramite ago cavo. Questo elimina la necessità di frequenti processi di pulizia. Per il controllo del movimento, è stato integrato il controller per motori passo-passo Open-Loop C5-01 di Nanotec.
Fonte e foto: Aingharann Pathmanathan

Pendolo inverso con controller logico programmabile
Un gruppo di studenti dell'Università Tecnica di Norimberga (TH Nürnberg), ha sviluppato un pendolo inverso con controller logico programmabile. Il pendolo è costituito da una barra rigida, libera di ruotare attorno al punto di sospensione. Attraverso un movimento controllato avanti e indietro del punto di supporto, è possibile mantenere la barra in posizione verticale e compensare eventuali disturbi. L'obiettivo principale del controllo è quindi stabilizzare il pendolo nella sua posizione di equilibrio instabile.
Per spostare il punto di sospensione dell'asta del pendolo si utilizza un asse lineare. Il sistema di azionamento utilizzato è il motore passo-passo AS5918L4204-ENM24 e il controller motore N5-1-1 di Nanotec.
L'utilizzo della tecnologia ad anello chiuso consente di sfruttare numerosi vantaggi:
- Movimento più fluido del motore
- Accelerazione più rapida
- Maggiore precisione di posizionamento
- Minore surriscaldamento del motore
Fonte e foto: Simon Northoff

Veicolo a guida autonoma
Nell'ambito della competizione di design ingegneristico "Formula Student", team di universitari da tutto il mondo si sfidano nella progettazione e costruzione di un prototipo di auto da corsa ad alte prestazioni per la Formula 1. Quest'anno il team dell'Università di Roma ha implementato in "Gajarda AWD" (questo il nome scelto per la vettura) un avanzato sistema ETC. Il veicolo è alimentato da un motore a combustione interna con trazione integrale.
Il motore passo-passo a coppia elevata ST2818L1404-A di Nanotec è stato impiegato come azionamento centrale dell'auto. Questo ha garantito massima precisione e affidabilità.

Joystick con force-feedback
Gli studenti dell'Università di Kassel hanno avuto l'idea di costruire il simulatore di volo Fieseler Storch. Nella sua versione attuale, il simulatore è dotato di uno schermo a 180° che immerge il pilota nella simulazione di un aereo a elica del 1936.
Nella prossima fase di sviluppo, sarà integrato un joystick aptico per simulare le forze del vento che agiscono sul timone e sui flap. Per realizzare il feedback vengono utilizzati due motori passo-passo di Nanotec (PD4-C6018L4204). Le forze sono trasmesse per mezzo di cinghie dentate con un rapporto di 1:5.
Fonte e foto: Daniel Strawe

Un team di sei studenti dell'Università di Scienze Applicate di Augusta (Hochschule Augsburg) ha sviluppato e costruito una macchina per dipingere campioni di colore per la Fritz-Felsenstein-Haus, una struttura che ospita persone con diversi tipi di disabilità.
Il progetto Paint Spinner ha puntato sul motore passo-passo a coppia elevata ST8918M6708-B di Nanotec. Il motore aziona aziona una piattaforma girevole su cui viene fissato un foglio di carta. Il colore viene dosato e applicato in modo controllato tramite una guida lineare e un sistema a pompa, lasciando cadere gocce di vernice sulla superficie. Grazie alla forza centrifuga generata dalla rotazione, le gocce di colore si espandono verso l'esterno, creando disegni unici in base alla velocità di rotazione e alla posizione dell'applicazione La velocità può essere impostata sul display touchscreen dopo l'avvio. I tre pulsanti visibili nell'immagine consentono di selezionare il colore, regolare la posizione del mandrino e applicare la vernice, facilitandone l'uso.
Fonte e foto: Patrick Lebmeier
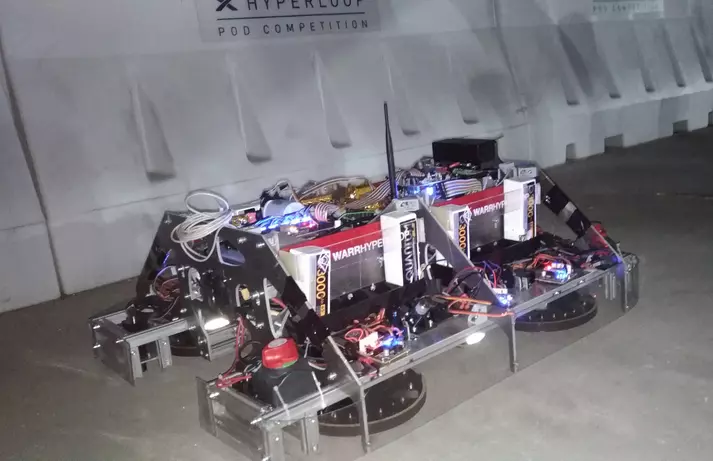
Il team WARR Hyperloop ha costruito presso l'Università Tecnica di Monaco (TU München) una capsula a levitazione controllata per il trasporto ad alta velocità. Quattro attuatori lineari sollevano la capsula in modo da poter avviare gli azionamenti di levitazione. Questo compito è svolto da quattro attuatori lineari L3518S1204-T6X1-A25 NEMA 14 di Nanotec.
Una volta avviati gli azionamenti, le "gambe Nanotec" si ritraggono automaticamente e la capsula inizia a levitare magneticamente, consentendo il trasporto di carichi fino a 50 kg.
Fonte e foto: Domenik Radeck
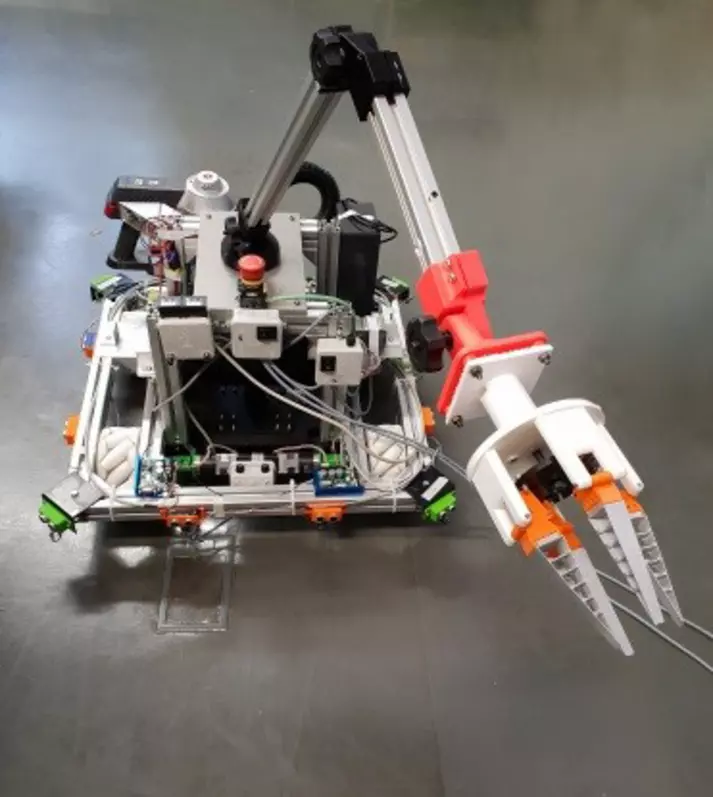
Nel semestre estivo del 2017, gli studenti dell'Università di Scienze Applicate di Monaco (Hochschule München) hanno sviluppato un robot domestico in grado di muoversi autonomamente e di aspirare la polvere. Il robot è dotato di un braccio di presa per poter afferrare e trasportare oggetti.
Gli studenti hanno integrato nel braccio del robot il motore passo-passo a coppia elevata ST5918L2008-B NEMA 23 e il riduttore a vite senza fine GSGE60-25-1 di Nanotec.
Fonte e foto: Philipp Heckenmüller
Il progetto studentesco Manuskripter ha portato alla creazione di un robot di scrittura in grado di riprodurre la scrittura a mano. La testina di scrittura del robot è stata equipaggiata con motori BLDC di Nanotec. I motori BLDC più potenti DB59 sono stati impiegati come motori a rotore interno.
Per consentire al robot di sollevare la testina di scrittura da qualsiasi posizione, i due motori grandi (assi 1 e 2) richiedono una coppia minima di 21 Ncm, mentre il motore più piccolo (asse 3) di 4,5 Ncm: questo avviene quando il braccio del robot è completamente esteso ad angolo retto.
Fonte e foto: Mathias Mettauer
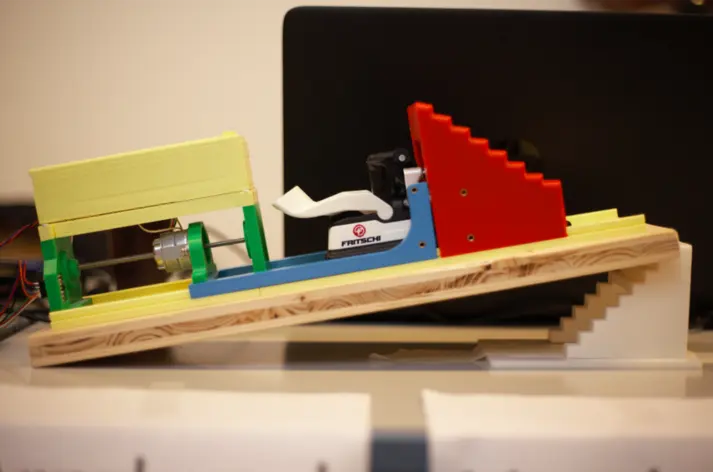
Il progetto "Easy Going" è un innovativo attacco da sci alpinismo sviluppato dagli studenti della HTBLA Rennweg di Vienna. Questo sistema integra una regolazione automatica dell’inclinazione, adattandosi automaticamente alla pendenza del terreno. In modalità automatica, l'attacco si regola in base alla pendenza del pendio. In modalità manuale lo sciatore può selezionare manualmente il livello di inclinazione desiderato tramite un semplice pulsante.
Ogni attacco è dotato di un motore, una batteria, un microchip e un modulo radio. Nell'attacco sono stati integrati due attuatori lineari Nanotec LSA201S06-A-TDBA-102, NEMA 8 (20 mm), che consentono un sistema di regolazione compatto ed efficiente, ideale per applicazioni con spazi ridotti.
Fonte e foto: Christopher Muhr
Il team dell'HTL Rennweg di Vienna ha progettato e realizzato un robot a due assi per la pulizia automatizzata delle lavagne da 60 cm x 45 cm, utilizzato nelle lezioni di robotica.
Per questo progetto gli studenti hanno utilizzato il motore passo-passo a coppia ST5918M3008-A NEMA 23 e due motori passo-passo ST4209L1704-A NEMA 17 in combinazione con il riduttore epicicloidale Economy GPLE40. Il motore ST4209L1704-A controlla il movimento lungo l'asse X, il gli altri due sull'asse Z.
Fonte e foto: Lukas Satzinger
Progettare e costruire un'auto da corsa nell'arco di un anno e portarla al traguardo sulle piste d'Europa: questo è l'obiettivo di Formula Student. Dal 2012, il team e-gnition della TUHH (Hamburg University of Technology) partecipa ogni anno a prestigiosa questa competizione con le sue monoposto elettriche. Il team è composto da circa 60 studenti provenienti da quasi tutti gli indirizzi della TUHH. Nel 2017 ha ottenuto il nono posto nella "Formula Student Germany", che si svolge ogni anno sul circuito dell'Hockenheimring.
Una novità del 2017 è stata l'introduzione della categoria Driverless, dedicata alla conversione di una delle vetture esistenti in un veicolo completamente autonomo. Per attuare questa trasformazione, gli studenti hanno installato il motore DC brushless DB59S024035 di Nanotec, utilizzato per azionare la colonna dello sterzo e consentire al veicolo di sterzare in modo completamente autonomo, sostituendo così le mani del pilota.
La gioia dopo la gara è stata grande: con la loro monoposto a guida autonoma, il team e-gnition Hamburg si è classificato al 3° posto nella classifica mondiale dell'Autonomous Design Award.
Fonte e foto: Ole Ramming

Per 13 mesi, i 21 studenti del team Punch Powertrain Solar dell'Università di Lovanio, in Belgio, hanno lavorato senza sosta alla progettazione e costruzione di Punch 2, la loro nuova auto solare, con cui l'8 ottobre hanno partecipato alla Bridgestone World Solar Challenge in Australia: una competizione estrema che li ha visti percorrere 3.000 km attraverso l’outback australiano, da Darwin ad Adelaide.
Quest’anno, il team ha introdotto numerose innovazioni per migliorare le prestazioni di Punch 2. Tra queste, spicca il nuovo sistema di sterzo a 4 ruote, composto da un asse anteriore e posteriore meccanicamente disaccoppiati. Fino a un angolo di sterzata di 90°, il sistema attiva solo lo sterzo delle ruote anteriori. Superati i 90°, entra in funzione anche lo sterzo delle ruote posteriori, migliorando agilità e manovrabilità del veicolo. Il movimento dello sterzo viene trasmesso a tutte e quattro le ruote tramite cavi.
Per testare il nuovo sistema, è stata costruita una copia del sistema di sterzo utilizzando un motore brushless DC di Nanotec in combinazione con un cambio. Questo azionamento è stato collegato al volante dell'impianto di prova, riproducendo fedelmente le sterzate che il veicolo avrebbe dovuto affrontare in gara. La forza di sterzata è stata simulata da molle ad alta resistenza, che insieme al cambio hanno generato la coppia necessaria.
Fonte e foto: Martijn Schaeken
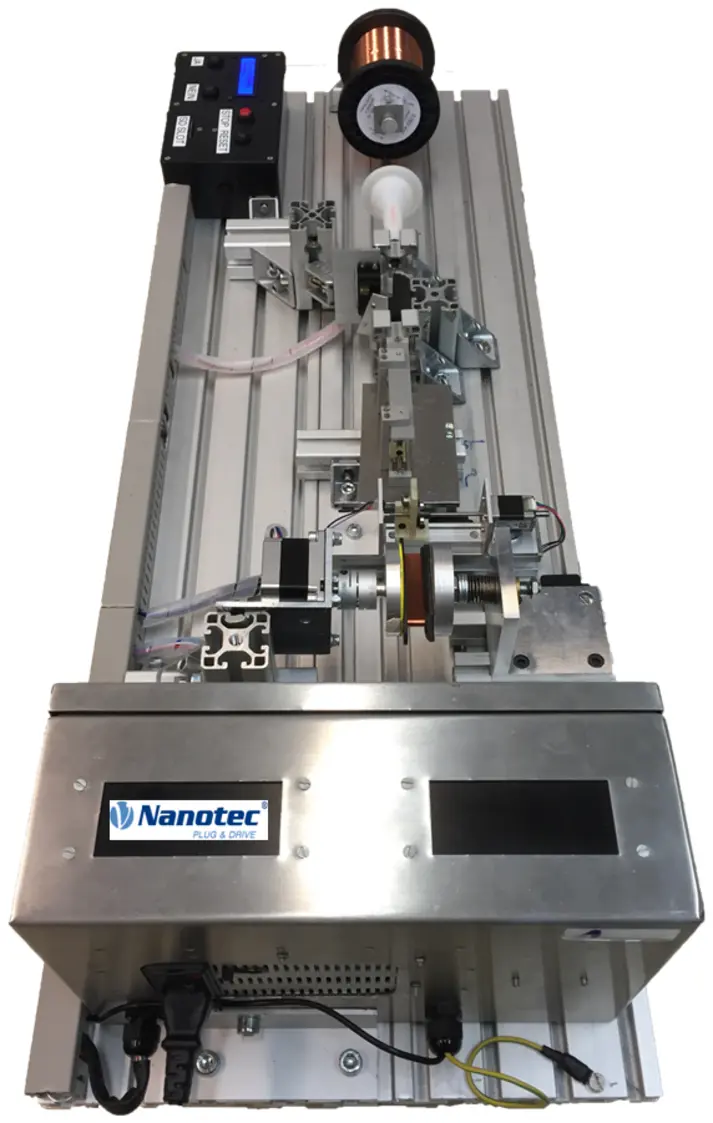
Nell'ambito del corso di Meccatronica e Tecnologie di Precisione presso l'Università di Scienze Applicate di Monaco di Baviera, nel corso del semestre estivo 2016 gli studenti hanno sviluppato un'avvolgitrice automatizzata per pickup di chitarra come parte del modulo didattico "Integrazione Meccatronica".
Per evitare che il filo di rame smaltato si spezzi durante l'avvolgimento sulla bobina del pickup, è stato progettato un sistema a molle che regola la tensione in modo ottimale. Grazie al controller SMCI35, il motore passo-passo ST5918 è stato programmato per gestire dinamicamente la velocità di avvolgimento: all'aumentare del numero di avvolgimenti, la velocità cresce progressivamente fino a raggiungere un valore prestabilito. Una volta raggiunta la velocità ottimale, il sistema mantiene un regime costante e stabile. A fine processo, il motore rallenta gradualmente, garantendo un avvolgimento uniforme e controllato.
Per garantire che il filo venga distribuito in modo uniforme lungo tutta la bobina, il sistema utilizza un attuatore lineare LS20, che genera un movimento costante del filo lungo l'asse di rotazione del pickup.

Dal 14 al 15 maggio 2016, la città di Bruges (Belgio) ha ospitato l’Ecorace-Challenge, una competizione in cui sette team hanno presentato riproduzioni in scala di navi cargo, giudicate in tre categorie: nave cargo più innovativa, miglior nave cargo "allround" e miglior nave "allround" (non da carico). Inoltre, è stato premiato il team con il miglior business plan.
I riconoscimenti per la nave cargo più innovativa e per quella più versatile e completa (allround) sono stati vinti dal team dell'Università KU Leuven. Il team ha presentato Galena, un modello in scala di una nave cargo per la navigazione fluviale, progettato per essere sviluppato fino a diventare un mezzo totalmente autonomo. Per il sistema di azionamento e controllo, Ecorace ha utilizzato il motore PD4-N5918L4204 e il cambio GPLE60-2S-16 di Nanotec.
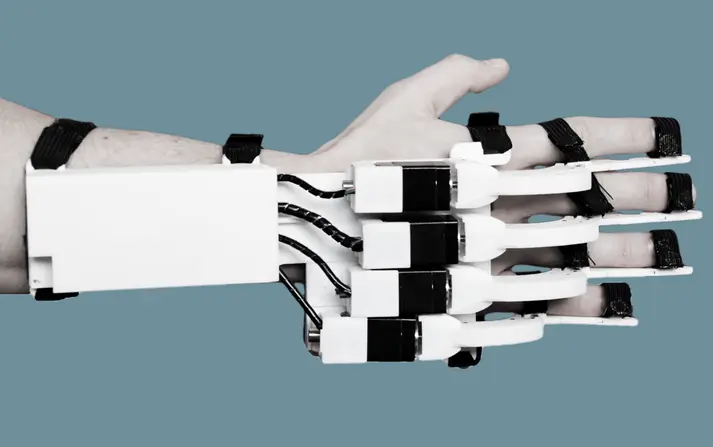
Ci congratuliamo con Dominic Libanio, Christian Schorr e Pascal Lindemann per la loro vittoria nel concorso Jugend Forscht e per il secondo posto ottenuto all'Ideenwettbewerb Rheinland-Pfalz, il concorso di idee del Land Renania-Palatinato. Il progetto, realizzato con il supporto dei motori Nanotec, si concentra sullo sviluppo di un dispositivo terapeutico innovativo per la riabilitazione della mano.
Dopo un intervento chirurgico alla mano, i risultati della terapia riabilitativa non sempre raggiungono il massimo potenziale medico. Motivi di costo e tempo spesso limitano l'accesso a una fisioterapia adeguata, con conseguenze significative per il paziente come limitazioni nei movimenti essenziali e compromissione della motricità delle articolazioni delle dita. Il dispositivo terapeutico sviluppato dal team non sostituisce il medico o il fisioterapista, bensì supporta e integra il loro lavoro offrendo una soluzione più accessibile ed efficace per la riabilitazione. Ogni dito è dotato di un meccanismo personalizzato, azionato da un motore lineare Nanotec.
Gli studenti del corso di Ingegneria Elettrica Industriale Applicata di un'università di Berlino hanno ricevuto l'incarico di sviluppare un robot in grado di costruire autonomamente una parete di qualsiasi forma, basandosi su un programma software programmato da loro stessi. Nel giro di sei mesi, il team ha progettato e realizzato un veicolo da costruzione quasi completamente autonomo e senza cavi, controllato da un microcontroller ATmega32 integrato a bordo. Il veicolo è azionato da due motori passo-passo interni Nanotec, ciascuno dei quali trasmette il movimento a una ruota esterna in alluminio collegata all'albero. Questa soluzione garantisce un controllo estremamente preciso. Due viti di scorrimento anteriori e posteriori migliorano la stabilità e contribuiscono a sostenere parte del peso del veicolo durante il movimento. Nella parte anteriore del veicolo si trova un attuatore lineare che può muoversi verso l'alto e verso il basso su una guida lineare e un'asta filettata. A questo è collegato un elettromagnete che può sollevare blocchi di legno dotati di una piastrina metallica, portarli all'altezza corretta e quindi depositarli con precisione millimetrica nel punto desiderato. Il veicolo è alimentato da una batteria ricaricabile agli ioni di litio da 12V. Un'interfaccia utente intuitiva consente all'utente di costruire un muro multistrato mentre il veicolo si muove in modo autonomo tra la base operativa e il cantiere, trasportando e posizionando i blocchi con precisione.
Marc Zechel, Robert Fibich

Dal 2009, l'Istituto di Ingegneria Meccanica dell'Università Westfälische Hochschule di Gelsenkirchen indice ogni anno un concorso in cui team di studenti sviluppano una determinata macchina capace di svolgere un determinato compito. La sfida di quest'anno consisteva nel progettare, produrre e programmare un apribottiglie automatizzato per tappi a corona che fosse in grado non solo di aprire le bottiglie ma anche di versare automaticamente una quantità predefinita di bevanda in un bicchiere. Il vincitore dell'edizione 2015 è stato un apribottiglie in cui il team di progettazione composto da quattro persone ha scelto l'attuatore lineare LS4118S1404-T6x2-75 di Nanotec per eseguire l'operazione di apertura delle bottiglie. I fattori chiave che hanno determinato il successo del progetto sono stati la velocità e l'affidabilità.

Nell'ambito del modulo dedicato ai progetti del corso di studi in Meccatronica e Tecnologie di Precisione presso l'Università di Scienze Applicate di Monaco di Baviera, gli studenti hanno ricevuto l'incarico di trasformare un'idea progettuale o un progetto esistente in un prodotto finito, completo di presentazione e dimostrazione pratica. Durante il semestre estivo del 2015, un team di studenti ha deciso di sviluppare una pompa peristaltica con una portata di un litro al minuto, occupandosi sia della progettazione meccanica, che dello sviluppo del software e della messa in funzione del sistema. Il tutto con una sfida ben precisa: contenere i costi di produzione sotto i 100 euro. Per rispettare il budget, il team ha sfruttato la stampante 3D del proprio ateneo per realizzare la maggior parte dei componenti. Il controllo della pompa è stato implementato con una scheda Arduino Micro, responsabile della comunicazione con il PC, del controllo del motore e dell'elaborazione dei dati provenienti dai sensori. La scheda elettronica è stata assemblata e saldata nel laboratorio di elettronica dell'università e integra il microcontrollore (µC), il sistema di alimentazione e il driver del motore. La velocità di rotazione viene controllata tramite un disco forato e quindi analizzata dal software. Per rendere il sistema facilmente interfacciabile con l'utente, il team ha sviluppato un frontend in C-Sharp. L'elemento centrale del progetto è il motore passo-passo Nanotec che funge da punto di collegamento tra la parte software e la struttura meccanica della pompa peristaltica.

Gli studenti dell'Istituto di Studi Teatrali Applicati dell'Università Justus Liebig di Gießen hanno sviluppato come progetto accademico una reinterpretazione di un'attrazione da luna park: il Kentucky Derby. Tradizionalmente questo gioco prevede che i partecipanti facciano avanzare un cavallo meccanico fino al traguardo manovrando con precisione delle sfere da gioco. A differenza del modello originale, in questa versione i partecipanti non possono interagire direttamente con il gioco: non controllano il cavallo ma il loro entusiasmo e coinvolgimento influenzano comunque l'esito della gara. Siedono in una stanza separata e osservati dal moderatore del gioco tramite una telecamera. Più i giocatori si mostrano coinvolti nel tentativo di spronare il proprio cavallo, ad esempio urlando o applaudendo, più il moderatore fa avanzare il cavallo nel gioco. Per l'azionamento dei cavalli sono stati utilizzati motori passo-passo del tipo PD4-N6018L4204, controllati dalla stessa piattaforma software che gestisce luci e suoni: una combinazione ideale di elementi meccanici e audiovisivi.

Nanotec Electronic sostiene il progetto universitario MALOMAT dell'Università di Scienze Applicate di Augusta (Hochschule Augsburg). Gli studenti del corso di laurea in Meccatronica hanno sviluppato un sistema che permette a bambini gravemente disabili di dipingere autonomamente su una tela.
Presso il Fritz-Felsensteinhaus di Königsbrunn, un centro per bambini con disabilità fisiche e mentali, la pittura svolge un ruolo importante nelle lezioni. Tuttavia, spesso ciò è possibile solo con grande sforzo perché in molti casi questi bambini non riescono a dipingere su una tela in modo autonomo. Generalmente scelgono un colore e indicano agli insegnanti quale parte della tela vogliono dipingere e gli insegnanti eseguono in base alle indicazioni del bambino.
Con MALOMAT gli alunni sono finalmente in grado di dipingere da soli. Dopo una breve preparazione, i bambini possono creare linee colorate autonomamente, scegliendo tra tre diverse tonalità. Il dispositivo offre due modalità di utilizzo e consente di regolare il livello di difficoltà, permettendo a più bambini di partecipare contemporaneamente. Nanotec ha sostenuto il progetto fornendo un motore con riduttore e un controller.

Nel corso di laurea in Meccatronica dell'Università di Scienze Applicate di Karlsruhe (Hochschule Karlsruhe), durante il semestre invernale 2014/2015 gli studenti hanno sviluppato un robot per il gioco dell'hockey da tavolo come parte di uno studio di progetto. Il robot è stato progettato per sostituire un giocatore umano e competere contro un avversario reale. Doveva essere completamente autonomo e in grado di prendere decisioni sulla dinamica di gioco in modo indipendente. Un sistema di sensori rileva sia la posizione che la velocità del disco, trasmettendo i dati a un'unità di elaborazione elettronica. Queste informazioni vengono poi inviate a un battitore azionato meccanicamente, che si sposta nella posizione ottimale per colpire il disco e restituirlo all'avversario. I motori passo-passo di Nanotec sono utilizzati per muovere il modulo scorrevole a cui è attaccato il battitore. Il modello ST5918L4508 fornisce la giusta coppia per questa applicazione e in questo caso è comandato dal controller SMCI35.
Fonte e foto: Jakob Bokemeyer, Sergej Krohmer, Tobias Sperling, Urs Wetzel, Simon Wörner (Università di Scienze applicate di Karlsruhe)

Un progetto fuori dal comune è stato realizzato con sei controller per motori passo-passo SMCI36 e SCMI35 di Nanotec Electronic GmbH & Co. KG: un impianto eolico ad aquiloni.
Questo sistema è stato sviluppato da otto studenti di ingegneria industriale appartenenti al programma di doppia laurea della Duale Hochschule Baden-Württemberg di Heidenheim. Grazie a questa invenzione il team ha vinto il Baden-Württemberg Challenge nell'ambito dell'European Satellite Navigation Competition 2011, concorso internazionale dedicato allo sviluppo di idee innovative basate sulla navigazione satellitare e noto anche come Galileo Masters, risultando anche il miglior team a livello europeo.