



This application note shows how to establish communication between Nanotec drives via CANopen. NanoJ programming allows you to realize simple master/slave functionalities, such as synchronizing two drives without a PLC.
PD4-E591L42-M-65-2A – Motore passo-passo con controller integrato IP65 - NEMA 23/24

Disponibilità
Aggiungi al carrello

PD4-E591L42-M-65-2A è stato aggiunto al carrello.
Accessori
| Z-K4700/50 | Condensatore |
|
|
| ZK-M12-5-2M-1-B-S | Cavo di alimentazione, 2 m |
|
|
| ZK-M12-12-2M-1-AFF | IO diritto, 2m |
|
|
| ZK-M12-5-2M-1-A-S-M | CAN in uscita, diritto, 2 m |
|
|
| ZK-M12F-M8M-5-200-S | CAN in diritto, 0,2 m |
|
|
| ZK-M12M-M8F-5-200-S | CAN in uscita diritto, 0,2 m |
|
|
| ZK-M12M-M12F-5-500-S | CAN in/out diritto, 0,5 m |
|
|
| ZK-M12-5-2M-1-AFF | CAN in linea retta, 2m |
|
È possibile configurare questo articolo con altri. Per iniziare, fate clic sul pulsante configura qui sotto.
Dati tecnici
-
Dimensione 56 mm
-
Fieldbus CANopen
-
Coppia di mantenimento 187 Ncm
-
Corrente nominale (RMS) 4.2 A
-
Numero di ingressi digitali 6
-
Numero di ingressi analogici 1
-
Numero di uscite digitali 2
-
Encoder
-
Risoluzione dell'encoder monogiro 17 bit
-
Lunghezza 126.5 mm
-
NEMA 23
-
Interfaccia -
-
Tensione operativa 12 VDC - 48 VDC
-
Corrente di picco (RMS) 4.2 A
-
Tipo di ingressi digitali 5/24 V commutabile
-
Tipo di ingresso analogico 0 - 20 mA / 0 - 10 V commutabile
-
Tipo di uscita digitale aperto-drain (max. 24 V/500 mA)
-
Tipo di encoder assoluto multigiro
-
Risoluzione dell'encoder multigiro 16 bit
-
Peso 1.4 kg
Dimensioni
Curve di coppia
Limite di carico consigliato:
Carico statico massimo a breve termine che può essere raggiunto tenendo conto della vita utile. della durata di vita.
Carico statico massimo a breve termine che può essere raggiunto tenendo conto della vita utile. della durata di vita.
|
Coppia
|
Potenza in uscita
|
Coppia [Nm] a 351.00 giri/min
|
||
|---|---|---|---|---|
| 4.2A 48V | 1.84 | |||
| 4.2A 24V | 1.4 | |||
|
|
||||
Scaricamenti
Schede tecniche
Manuali
Certificati
Accessori
| Z-K4700/50 | Condensatore |
|
|
| ZK-M12-5-2M-1-B-S | Cavo di alimentazione, 2 m |
|
|
| ZK-M12-12-2M-1-AFF | IO diritto, 2m |
|
|
| ZK-M12-5-2M-1-A-S-M | CAN in uscita, diritto, 2 m |
|
|
| ZK-M12F-M8M-5-200-S | CAN in diritto, 0,2 m |
|
|
| ZK-M12M-M8F-5-200-S | CAN in uscita diritto, 0,2 m |
|
|
| ZK-M12M-M12F-5-500-S | CAN in/out diritto, 0,5 m |
|
|
| ZK-M12-5-2M-1-AFF | CAN in linea retta, 2m |
|
Base di conoscenza
Our example programs show you how to use NanoJ code templates for the individual configuration of Nanotec motor controllers.
The examples and the Application Note show you how the NanoJ Library simplifies the use of the CiA 402 Power State Machine. The functions of the library are contained in a single header file, which you can easily add to your NanoJ project in Plug & Drive Studio.

Closed-loop field-oriented control is a method of running stepper motors much like a servo motor, i.e. smoothly, with low resonance and position-controlled.
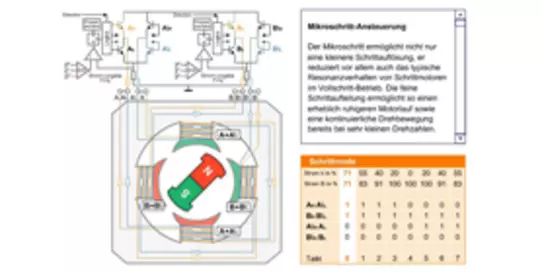
This interactive, animated demonstration shows how stepper motors work. It starts when you move the "continuous" slider to the left or right. Alternatively, you can also view individual images by clicking the arrows.

To reduce the length of the wiring harnesses in vehicles and save on weight, the Bosch company developed the so-called CAN bus for networking control units in 1987. CAN is the abbreviation for "Controller Area Network" and is often used in combination with "bus" (Binary Unit System) to describe a system for the transmission of data between different devices on a shared transmission path.